MBS Husky Startup¶
The launch file mbs_husky.launch includes everything which is being
launched at the startup. This file can be updated to include all the nodes needed
to run at the startup (e.g. your own packages). Startup job and its contents can be
verified in the directory /etc/ros/noetic; here the original launch file will
be copied.
Important
Do not create multiple startup jobs with multiple launch files this will break the system. Only one launch file should be created and everything else should be included in this.
If the systems breaks at startup you can start debugging by:
roslaunch mbs_husky_startup mbs_husky.launch
This will show which part of the launch file is having errors or you can start running everything in the launch file one by one in separate terminals.
Note
Once you add your custom node or launch files in the mbs_husky.launch,
you will need to run the following script so that it updates the start-up job on
the Husky’s PC; to run with the newly updated mbs_husky.launch.
rosrun mbs_husky_startup startup_script.sh
MBS Viz¶
The mbs_viz package will be the primary viewing tool for the robot. It is launched via:
roslaunch mbs_viz viz.launch
Important
At start-up only the Husky and Phidgets IMU hardware drivers are running, whilst the Husky-xARM6-Robotiq and the Robotiq gripper are both powered-off, due to which only the Husky will be displayed. Once the xARM6 and the Robotiq hardware drivers are powered on then, they will show up in the rviz display.
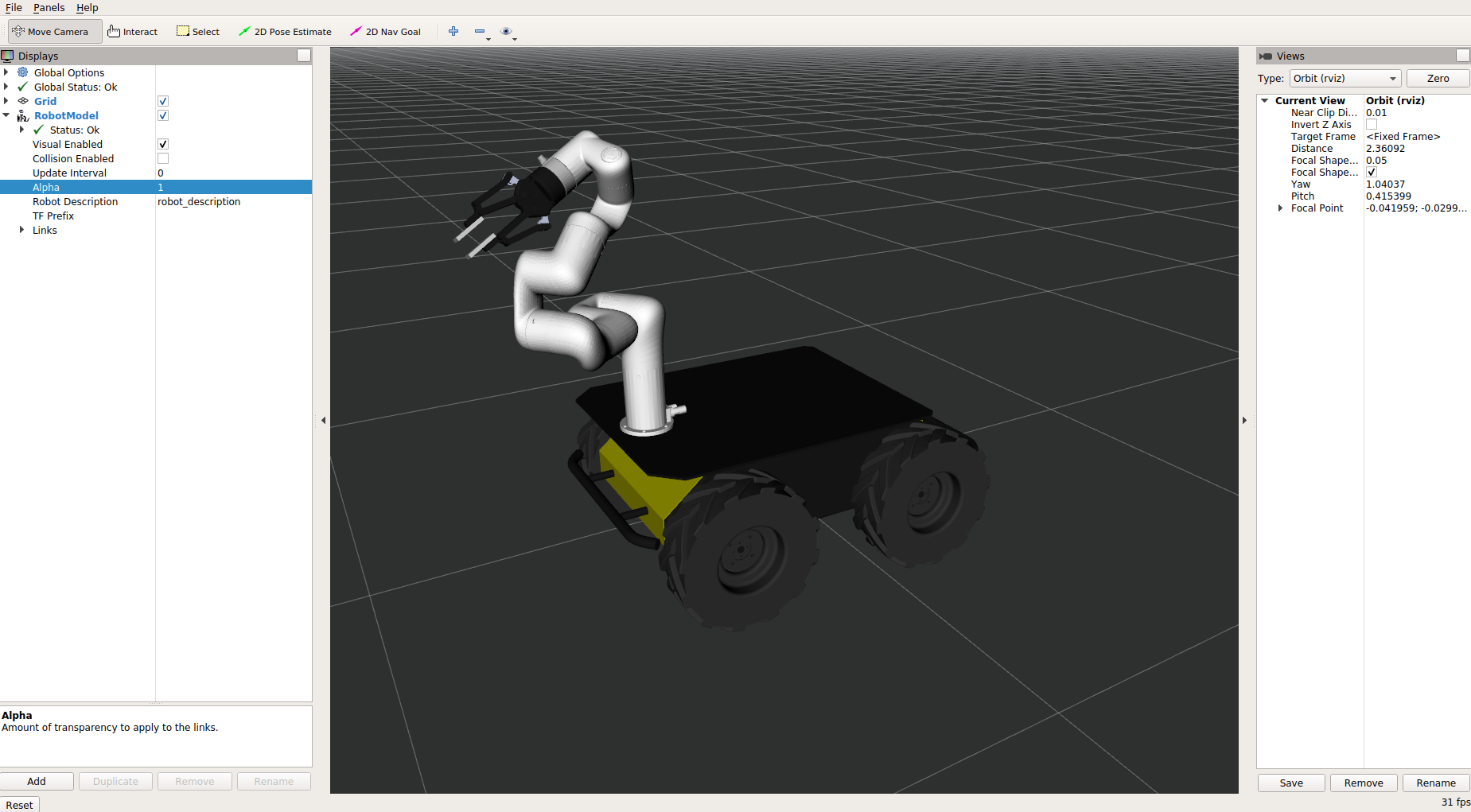
RVIZ display for the Husky-xARM6-Robotiq¶
MBS Husky Description¶
The launch file description.launch includes a custom URDF that has the Husky, xARM6, Phidgets imu, and Robotiq 2f-140
gripper integrated into it. It simply uses the roswiki robot_state_publisher to publish the static joints of
the robot. It is automatically launched via the startup job. To launch it manually, it can be done via:
roslaunch mbs_husky_description description.launch
The bringup.launch launches the description launch file as well as the fake joint state publishers from
roswiki joint_state_publisher_gui. It can be used for visualization when not connected to the robot or for
debugging the URDF. It can be launched via:
roslaunch mbs_husky_description bringup.launch
MBS xARM Robotiq¶
The mbs_xarm_robotiq package is used to turn on the hardware drivers for the xARM6 and the Robotiq gripper.
xARM6¶
xARM6¶
Ensure that the xARM6 is powered-on by following the Start-up.
To launch the xARM6 hardware driver, run the command:
roslaunch mbs_xarm_robotiq xarm_hardware_driver.launch
To launch a stand-alone moveit planner for the xARM6:
roslaunch mbs_xarm_robotiq xarm_standalone_moveit.launch
Note
Currently, for the xarm_standalone_moveit.launch the xARM6, is only valid. The gripper has not yet been
configured to work with it in the moveit planner. For more information on how to use this, you may check
the roswiki moveit_setup_assistant.
Robotiq Gripper 2f-140¶
Robotiq Gripper 2f-140¶
Ensure that the xARM6 is powered-on by following the Start-up. * To launch the Robotiq 2f-140 hardware driver, run the command:
roslaunch mbs_xarm_robotiq robotiq_hardware_driver.launch
The hardware driver launches an action-client server as well as a joint-state publisher for the gripper.
An example on how to communicate with the gripper is available in the mbs_xarm_robotiq/nodes/test_robotiq_gripper.py