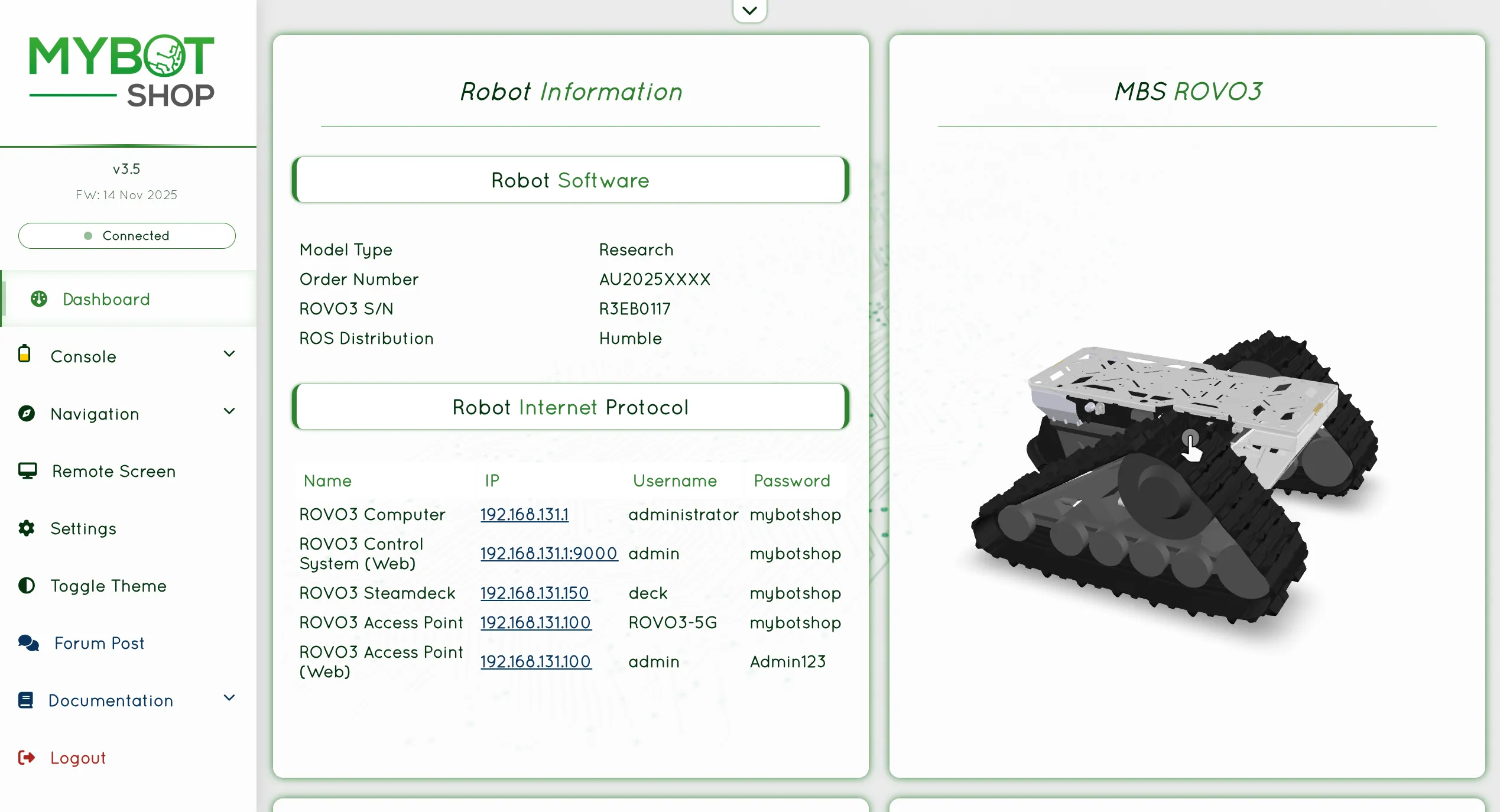
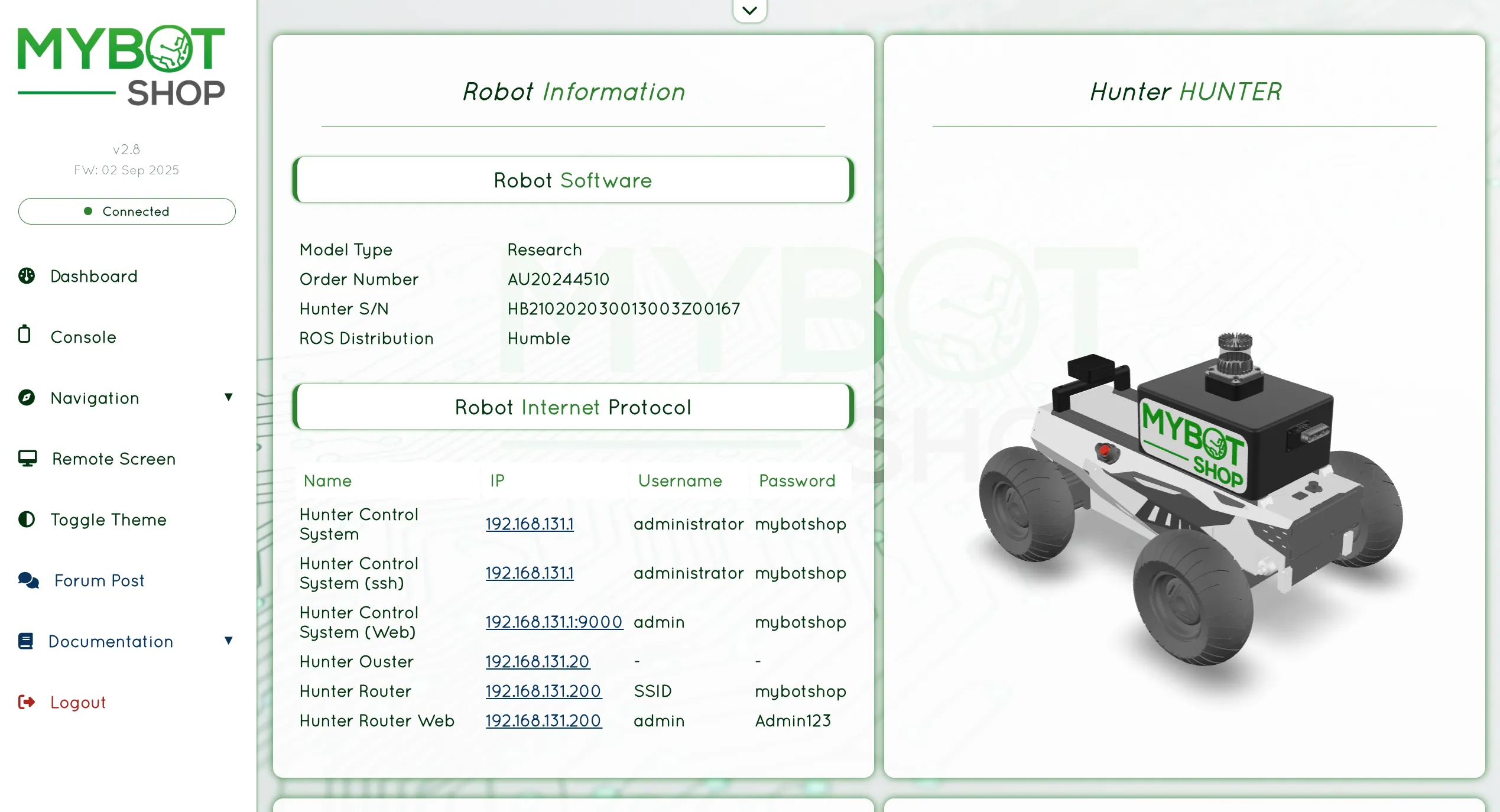
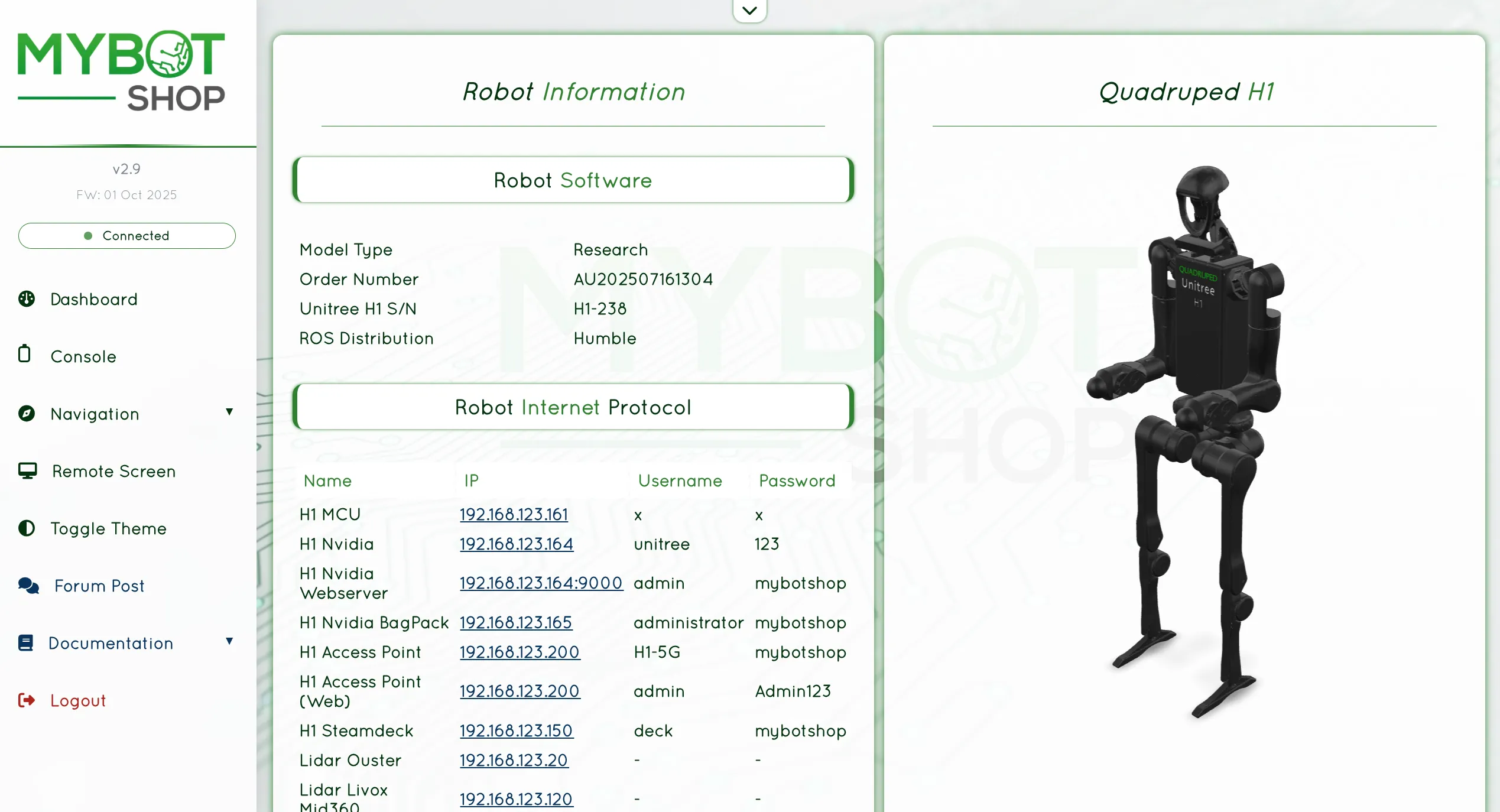
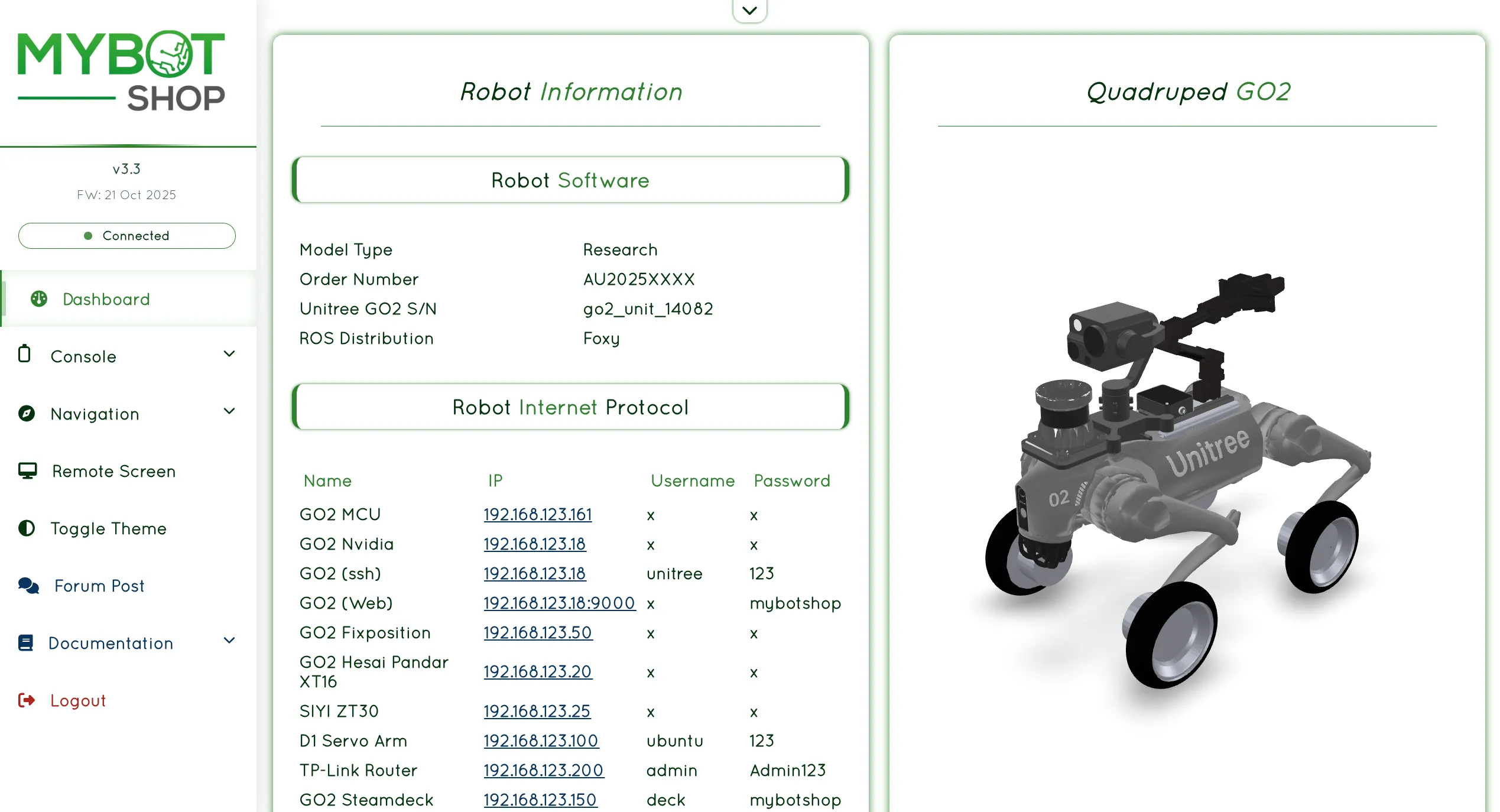
Robotic Webserver
|
|
|
|
Note
Supported ROS Distributions:
ROS Noetic
ROS Foxy
ROS Humble
ROS Jazzy
ROS Kilted Kaiju
ROS ++
The robotic webserver is a unified, platform-agnostic interface for monitoring and controlling robots through ROS. It supports a wide range of robot configurations and provides tools for real-time system insight, teleoperation, and configuration.
Key Capabilities
1. Real-Time Telemetry
Live sensor streams
Diagnostic status and fault reporting
System-level performance indicators
3. Remote Operation Features
Remote desktop/screen sharing for onboard systems
Integrated camera feeds
Manual and autonomous control inputs
4. Manipulation
(on platforms equipped with an arm)
Arm jogging, Cartesian goals, and gripper control
Record and replay arm motion waypoints
5. Skills and Missions
Built-in skills (wait, capture image, play audio)
Skill sequences attached to navigation waypoints
Recorded arm missions reusable as skills
6. Diagnostics and Notifications
Live system metrics with historical snapshots
Configurable health thresholds
Browser toast notifications
7. Optional Assistant and Voice
Text and voice chat with an AI assistant
Speech-to-text and text-to-speech workflow
Managed text-to-speech voice library
8. Custom Command Integration
Extend interface functionality
Add bespoke controls for specialized hardware
Scriptable action execution
Technology Overview
The webserver is developed using modern web technologies to provide a responsive, stable, and low-latency user experience.
Core Technologies
WebSocket-based communication for continuous real-time command and telemetry exchange
Modular UI components enabling tailored dashboards
Responsive design, supporting both desktop and mobile devices
Extensibility
Users can integrate custom modules, commands, and visualizations to match their operational needs. The architecture supports:
Plugin-style feature additions
Dynamic UI extension
Custom ROS topic, service, and action bindings