Aloha Research
|
|
|
ALOHA 2 builds on the original ALOHA system and addresses many of its limitations through redesigned hardware and upgraded software.
Key intentions behind the redesign:
Extend and improve large-scale data collection
Provide a robust and flexible platform for complex manipulation tasks
Improve ergonomics and long-term usability for operators
The hardware design is published as open-source, allowing research groups worldwide to:
Rebuild the platform
Modify components
Contribute improvements back to the community
This modular, customizable architecture supports a wide range of research in robotic learning, teleoperation and human–robot collaboration.
Key Features
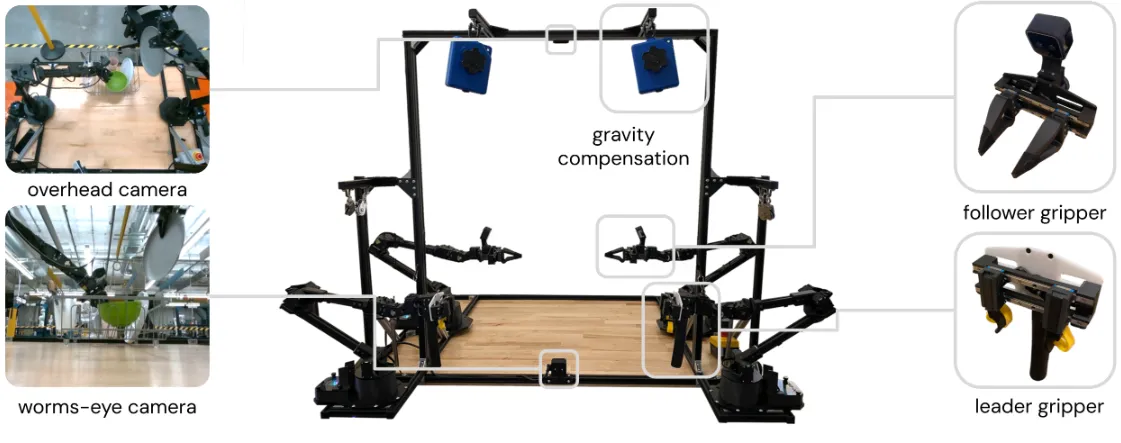
Enhanced grippers - Mounted on low-friction rails for smooth and accurate motion - Designed for both delicate handling and higher-force operations - Optimized for low latency and high responsiveness during teleoperation
Advanced gravity compensation - Passive mechanical gravity compensation replaces earlier rubber-band solutions - Reduces physical effort and fatigue for the operator - Improves stability and comfort during long teleop sessions
Reinforced frame and high-resolution cameras - Aluminum extrusion frame: lightweight, stiff and expandable - Supports larger props and human co-workers in the workspace - Intel RealSense D405 cameras provide depth sensing, wide field of view and accurate 3D perception for manipulation tasks
The open-source philosophy behind ALOHA 2 encourages shared development of both hardware and software, helping the community push forward teleoperation and manipulation research. For detailed technical information, see the official project website.