ROS1 noetic
⇒ Reason of ROS (T)
Understanding the purpose and significance of Robot Operating System (ROS).
⇒ ROS Control (Brief Overview) (T)
Overview of ROS control mechanisms for managing robotic systems.
⇒ ROS Package Build (T)
Introduction to building ROS packages for organizing and distributing ROS software.
⇒ ROS Bridge (T)
Explanation of ROS Bridge for communication between ROS and other frameworks.
⇒ ROS Simulation (P)
Practical session on simulating ROS environments and robotic systems.
⇒ ROS Create Package (P)
Hands-on activity on creating ROS packages for specific tasks.
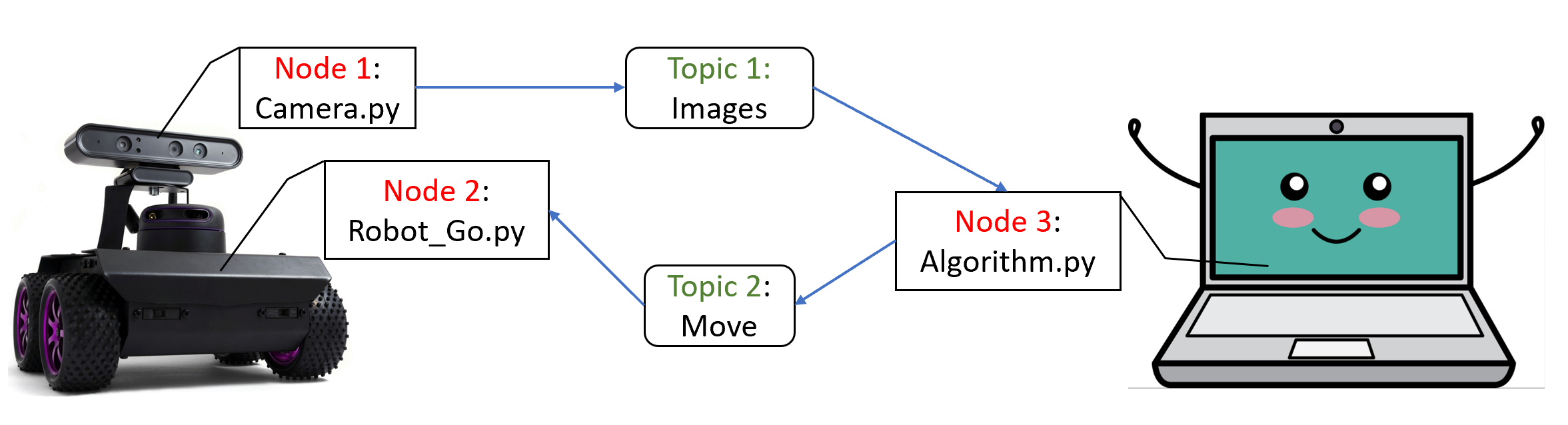
ROS1 Nodes
⇒ ROS Nodes (T)
Understanding ROS1 nodes, their roles, lifecycle, and best practices for coding and structuring.
⇒ Create ROS Node (P)
Creating custom ROS1 nodes, debugging, and integrating with other components.
ROS1 Launch Files
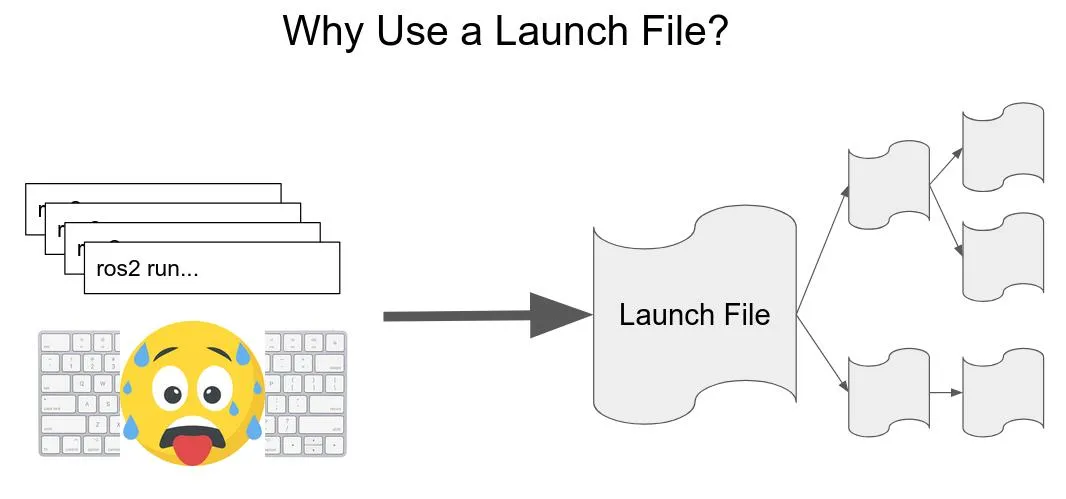
⇒ ROS Launch Files (T)
Overview of ROS1 launch files, syntax, managing complex systems, and debugging techniques.
⇒ Create ROS Launch File (P)
Creating launch files for multiple ROS1 nodes, troubleshooting, and writing reusable configurations.
⇒ ROS Sensor Fusion (P)
Demonstration of sensor fusion techniques in ROS1 for enhanced perception.
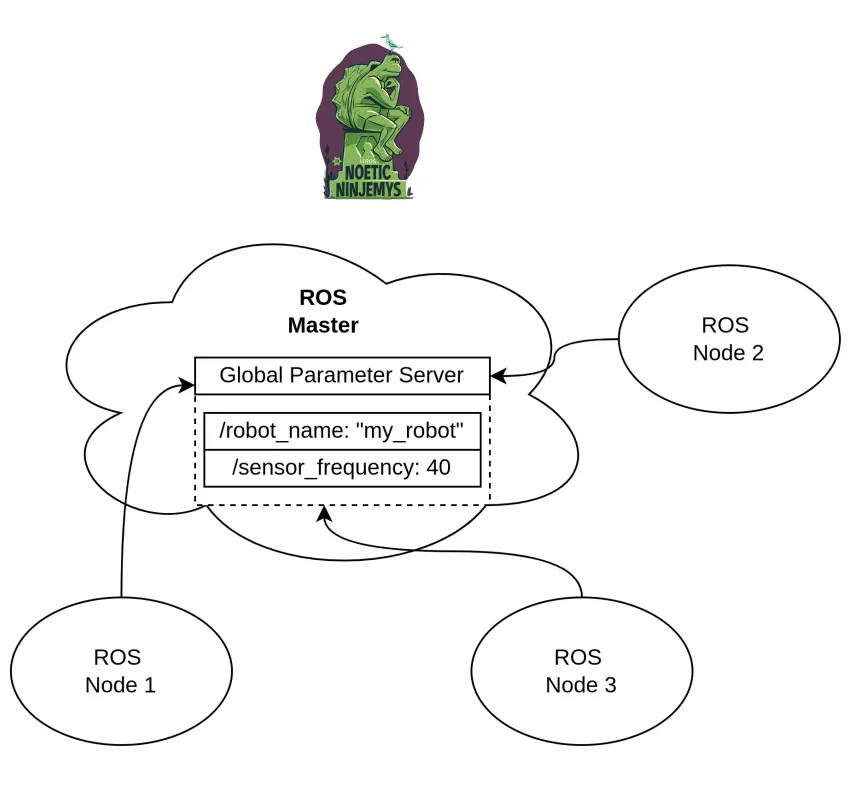
ROS1 Parameters
⇒ ROS Parameters (T/P)
Explanation of the ROS1 parameter server, dynamic updates, and best practices for managing parameters.
⇒ Create ROS Parameter Loading (P)
Loading and using ROS1 parameters, dynamic reconfiguration, and integration with launch files.
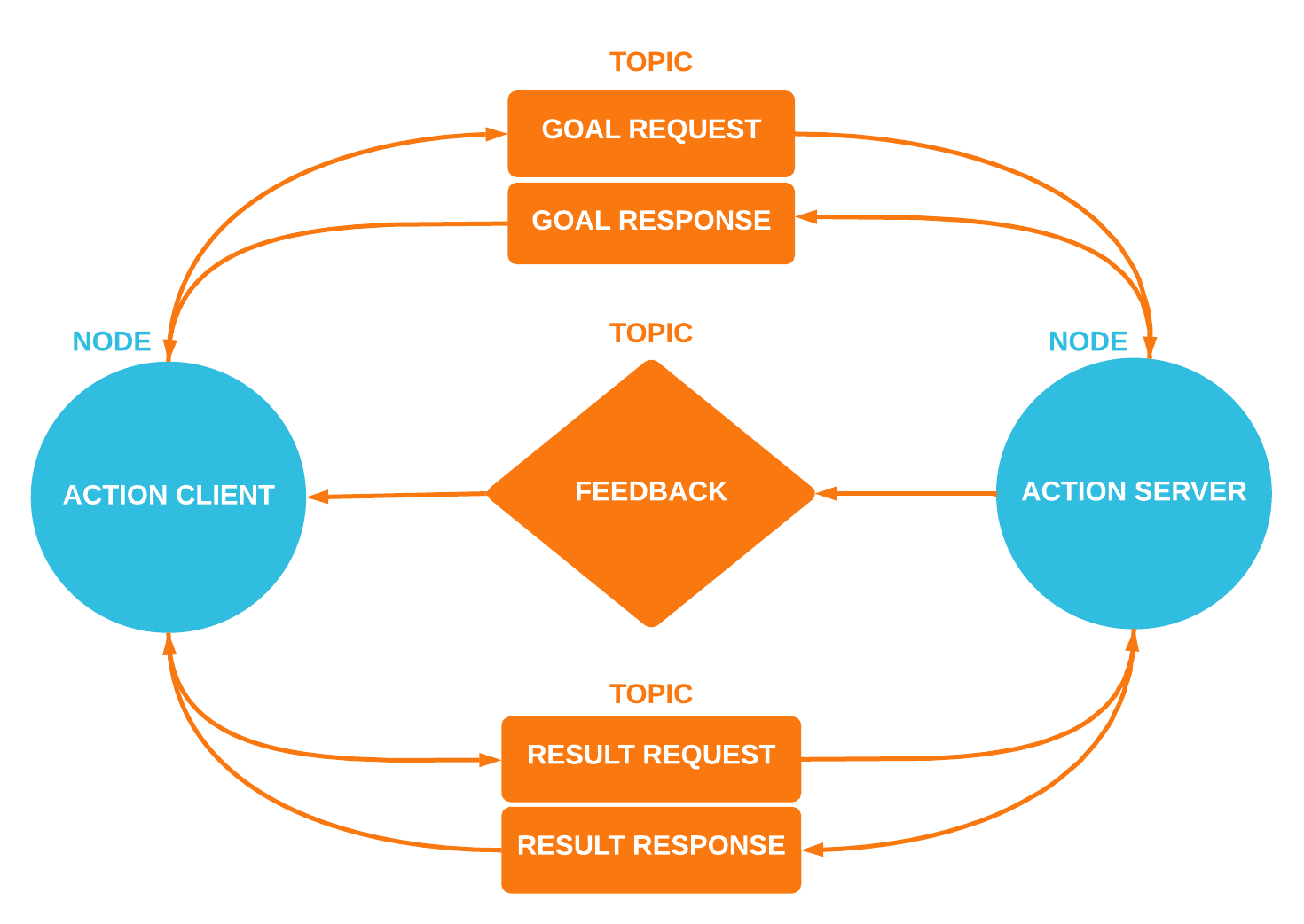
ROS1 Actions
⇒ ROS Actions (T/P)
Introduction to ROS1 action servers, implementing custom actions, and handling preemption and feedback.
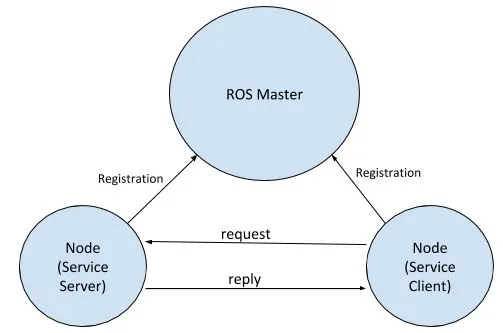
ROS1 Services
⇒ ROS Services (T/P)
Overview of ROS1 services, creating and calling services, and designing efficient interfaces.
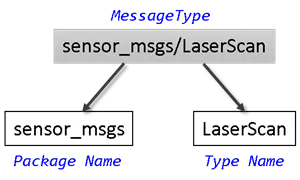
ROS1 Msgs
⇒ ROS Msgs (T/P)
Understanding ROS1 message types, creating custom messages, and debugging message data.
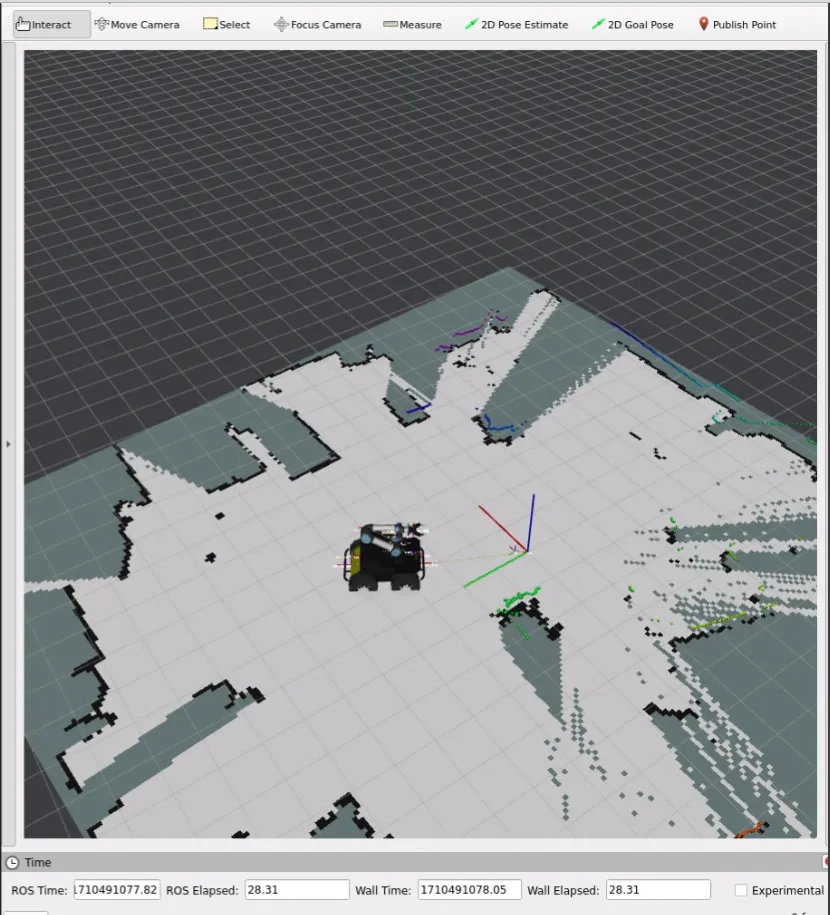
ROS1 Navstack
⇒ Setup (P)
Practical setup of ROS navigation stack for autonomous robot navigation.
⇒ Mapping (P)
Hands-on mapping exercises for creating maps of robot environments.
⇒ Localization (P)
Practical session on robot localization techniques using ROS navigation stack.
⇒ Planner Tuning (P)
Tuning and optimization of robot motion planners for efficient navigation.
⇒ Custom Robot Integration (P)
Integration of custom robot hardware with ROS navigation stack.
⇒ Debugging (P)
Techniques for debugging and troubleshooting issues in ROS navigation stack.
⇒ Tools Usage (P)
Introduction to various tools and utilities for ROS navigation stack development.

ROS1 Perceptionstack
⇒ Lidar/Depth Camera Setups (T)
Understanding different lidar/depth camera setups and configurations.
⇒ Lidar/Depth Camera Configuration (T)
Configuration of lidar/depth cameras for use in ROS perception tasks.
ROS1 Manipulationstack
⇒ Moveit (T)
Introduction to MoveIt framework for robotic manipulation and motion planning.
⇒ Moveit Setup (T)
Setup and configuration of MoveIt for robot manipulation tasks.
⇒ Moveit Manipulation Tips (T)
Tips and best practices for effective robot manipulation using MoveIt.
Personal Experience
⇒ Issues faced
Discussion on common challenges encountered during ROS development and deployment.
⇒ Debugging
Strategies and techniques for debugging ROS software and robotic systems.
⇒ Tools Usage
Overview of useful tools and utilities for ROS development and debugging.