Introduction

MYBOTSHOP ROVO2 Tracked Robot Platform
The MYBOTSHOP ROVO2 is a rugged tracked robot platform designed for autonomous mobile robot (AMR) applications. The tracked chassis provides superior terrain traversal capabilities compared to wheeled platforms, making it ideal for outdoor environments, rough terrain, and challenging surfaces.
The power pack is driven by 2 x 7.5KW electric motors, reduced via 1:16 gears providing considerable payload and tractive force. Despite the high gear reduction, the MBS ROVO2 reaches a top speed of 20km/h. The battery integrated in the chassis provides an extremely low center of gravity and a range of approximately 8 hours or 40km.
Quick Links
Resource |
Link |
|---|---|
MYBOTSHOP Website |
|
ROVO2 ROS Documentation |
|
Robot Webserver |
|
ROS2 Jazzy Documentation |
|
Gazebo Harmonic Docs |
|
Nav2 Documentation |
External Dependencies
Package |
Documentation |
|---|---|
Ouster LiDAR Driver |
|
Intel RealSense ROS2 |
|
Teleop Twist Keyboard |
|
Nav2 Navigation |
|
ros_gz Bridge |
Current Available Features
Feature |
Status |
Notes |
|---|---|---|
ROVO2 Visualization (RViz2) |
Available |
|
ROVO2 Base High Level Driver |
Available |
Joint State, IMU, CMD, Odometry |
ROVO2 Description (URDF/Xacro) |
Available |
|
ROVO2 Lidar (Ouster) |
Planned |
|
ROVO2 Depth Camera (Intel Realsense D435i) |
Planned |
|
ROVO2 Autostart Services |
Available |
|
ROVO2 Twist Multiplexer |
Available |
|
ROVO2 SLAM |
Planned |
|
ROVO2 Odometry Navigation |
Planned |
|
ROVO2 Map Navigation |
Planned |
|
ROVO2 Webserver |
Available |
|
ROVO2 Gazebo Harmonic Simulation |
Available |
ROVO Platform
The ROVO2 is based on the HAWE Mattro ROVO platform, a fully electric tracked drive system designed for off-highway autonomous applications.
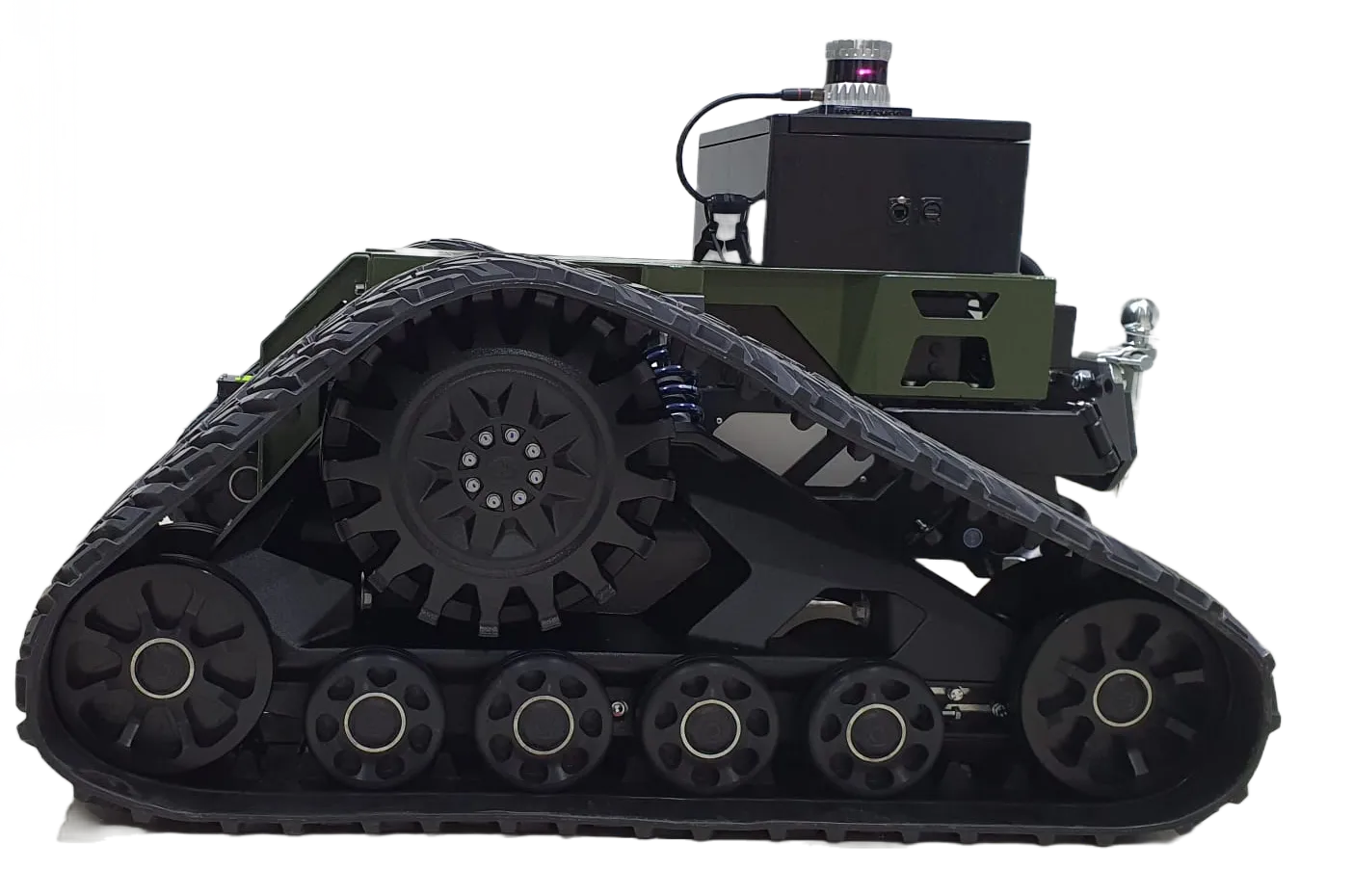
ROVO2 Side View
Manuals
Note
Product documentation and manuals are available for customers only. Please contact MYBOTSHOP for access to the following documents.
Specifications
Mechanical
Parameter |
Value |
|---|---|
Chassis Type |
Tracked |
Drive System |
Dual Track Drive (2 x 7.5KW) |
Gear Ratio |
1:16 |
Top Speed |
20 km/h |
IP Rating |
IP65 |
Electrical
Parameter |
Value |
|---|---|
Battery Type |
Lithium (Integrated) |
Battery Range |
~8 hours / 40km |
Communication Interface |
CAN Bus |
CAN Bitrate |
500 kbit/s |
Base Software
Parameter |
Value |
|---|---|
Operating System |
Ubuntu 24.04 LTS |
ROS Distribution |
ROS2 Jazzy |
Simulator |
Gazebo Harmonic |
Navigation Stack |
Nav2 |
Datasheets
Core Components
Auxiliaries
Belt Tightening
In case the ROVO veers off to either the left or right, the issue may be traced back to the tracks being loose.
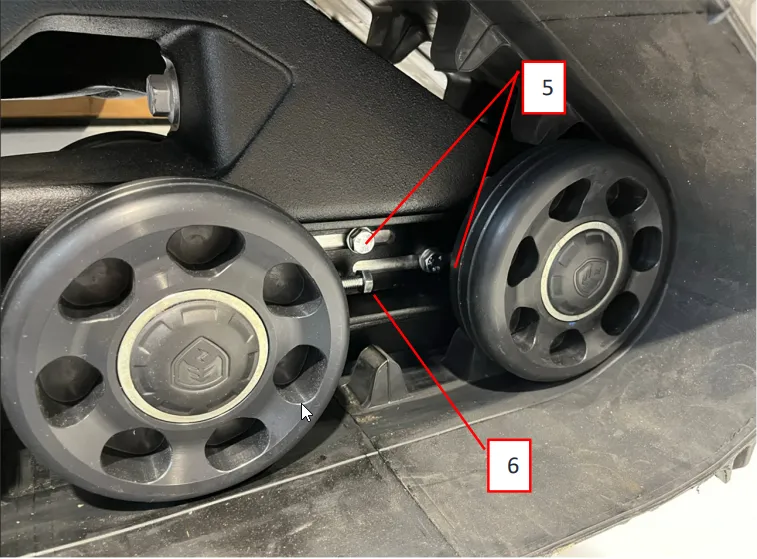
ROVO2 Belt Tightening Adjustment
To remedy this situation:
First loosen screw number 5
Adjust the track tension with screw number 6
Finally, tighten screw number 5 again with
25Nm