Fixposition Configuration
Once connected to the Fixposition as described in Fixposition Connection. Then you can configure your device via the web interface.
Access the web interface at
10.0.2.1
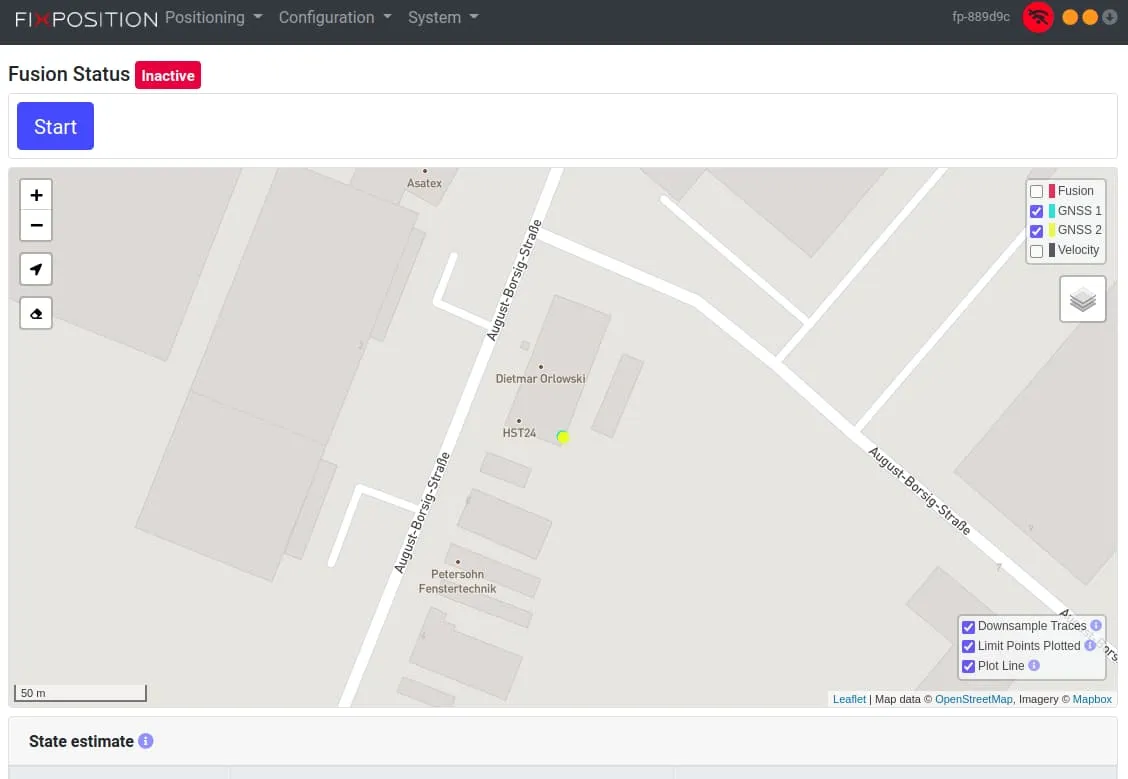
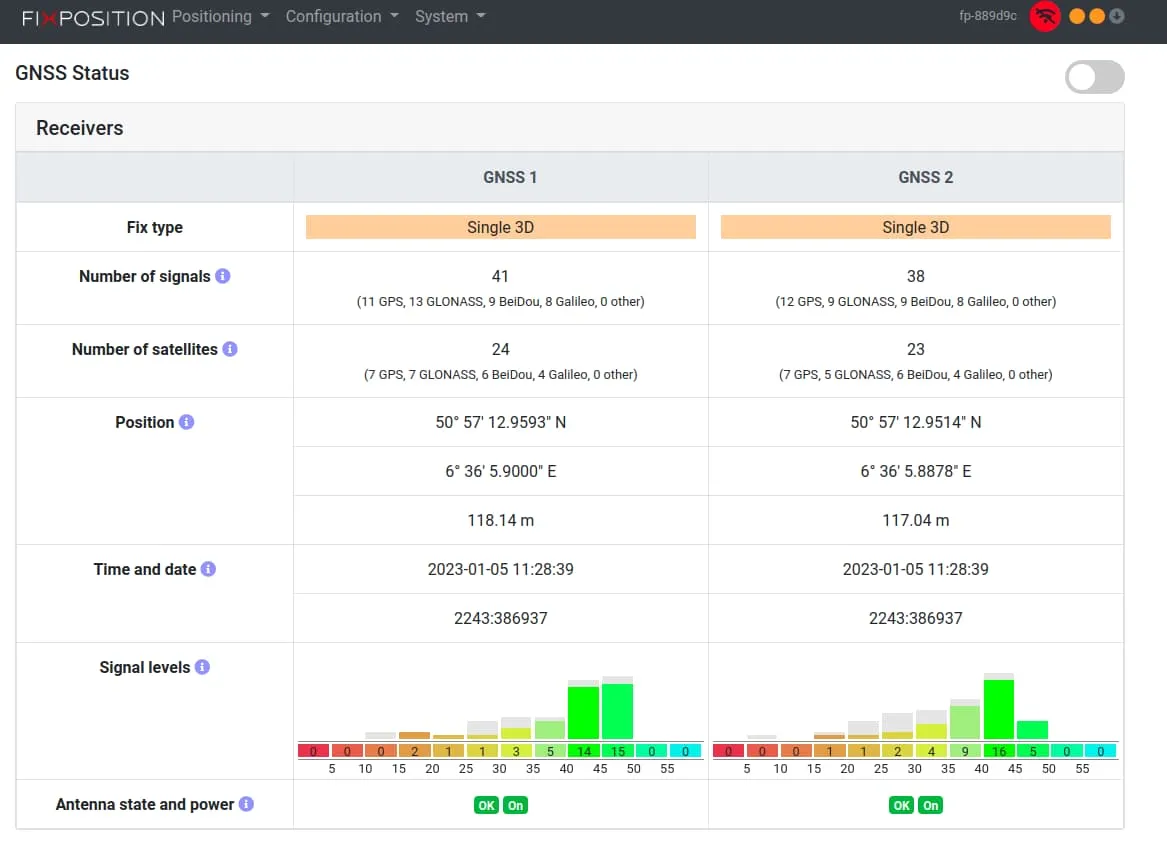
If the Fixposition is outdoors then you can verify the GNSS stream, by clicking
PositioningandGNSS Status
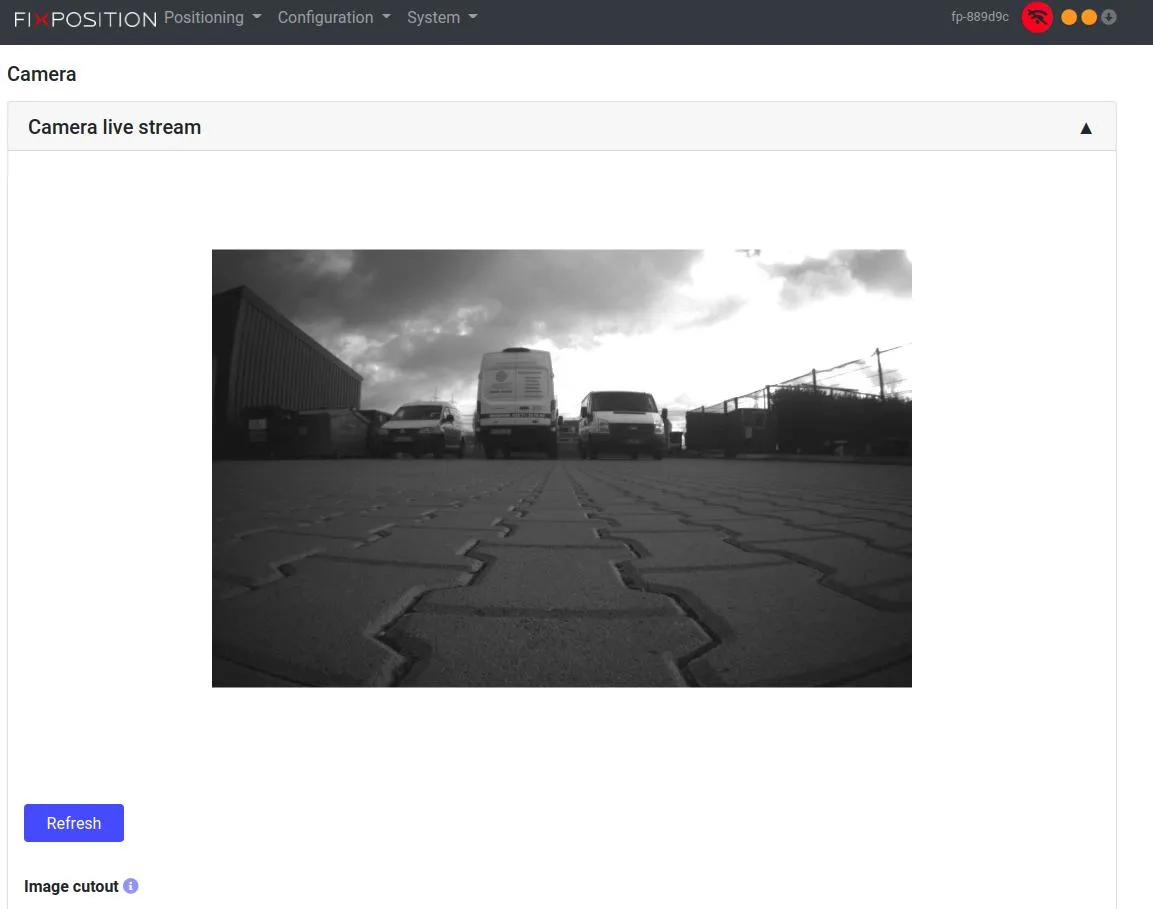
The Fixposition’s camera can be verified as well, by clicking
ConfigurationandCamera. The camera parameters and calibration can be performed via the provided interface.
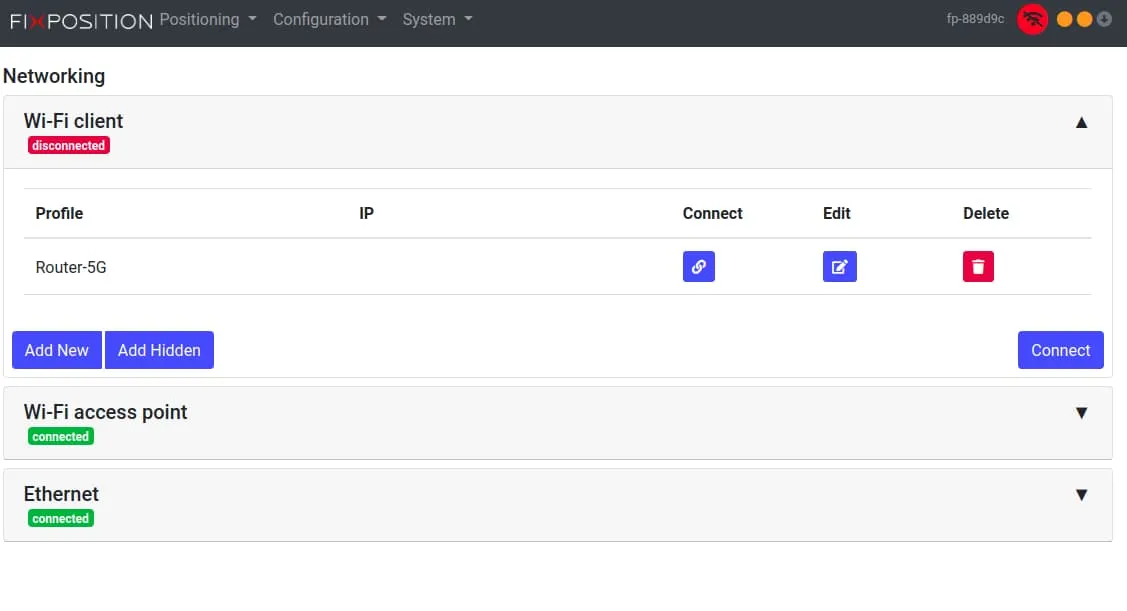
The Fixposition can be connected to the a local router, by clicking
ConfigurationandNetworking. Here custom IPs and passwords can be configured.
Warning
Without the connection to a base station or NTRIP, the ROS driver shall not display any information, however, if the connection is lost after first time intialization, then the Fixposition will continue to provide data. Hence, it is imperative to ensure that you the Fixposition connected to the base station whenever you power-on the device.
The next step is to connect the Fixposition to a local base station for GPS correction. This can be done either by another GPS or by connecting the Fixposition to the internet and providing it an NTRIP.
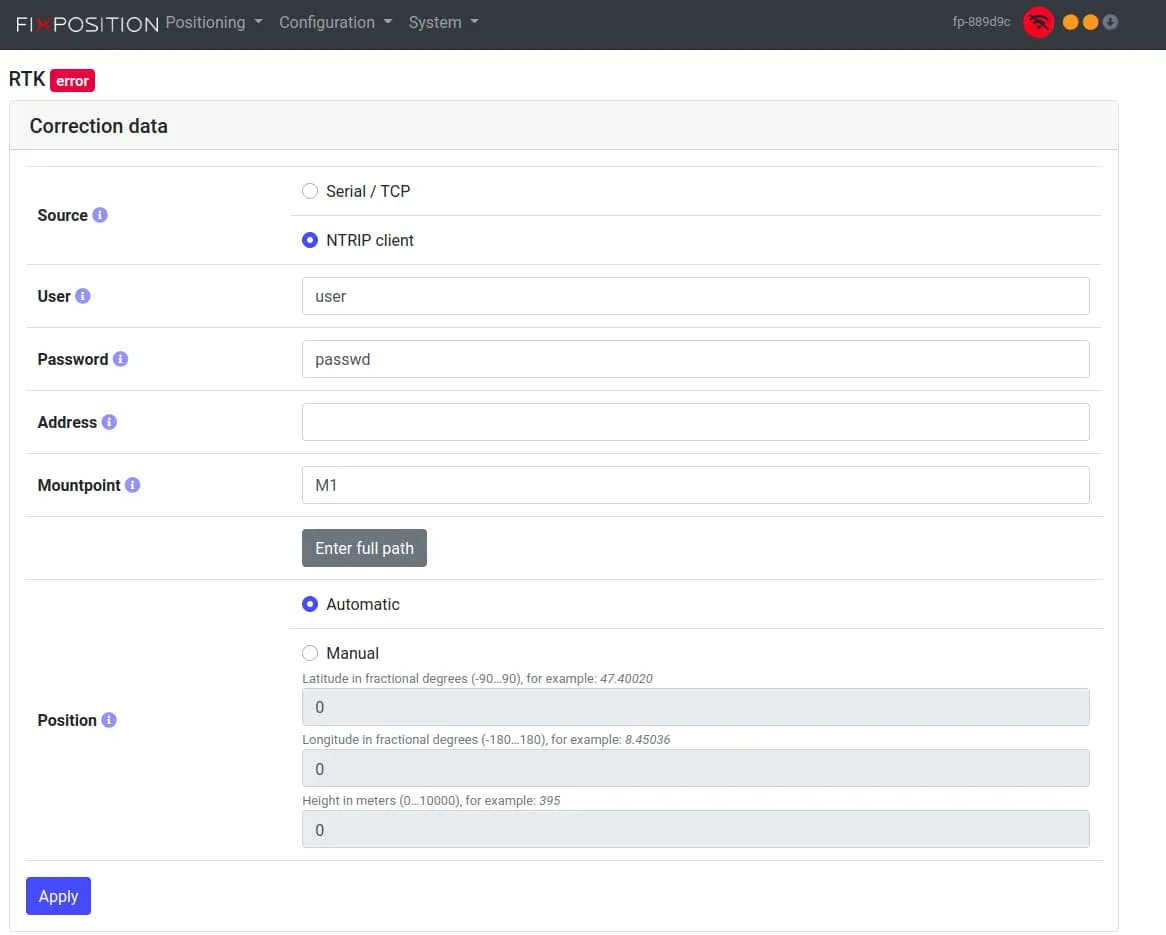
Warning
Without the connection to a base station or NTRIP, the ROS driver shall not display any information, however, if the connection is lost after first time intialization, then the Fixposition will continue to provide data. Hence, it is imperative to ensure that you the Fixposition connected to the base station whenever you power-on the device.
On successful connection to the base station and WiFi, a green icon can be seen on the display bar. At this point you may start the Fusion, which is required for getting the data on the ROS driver.
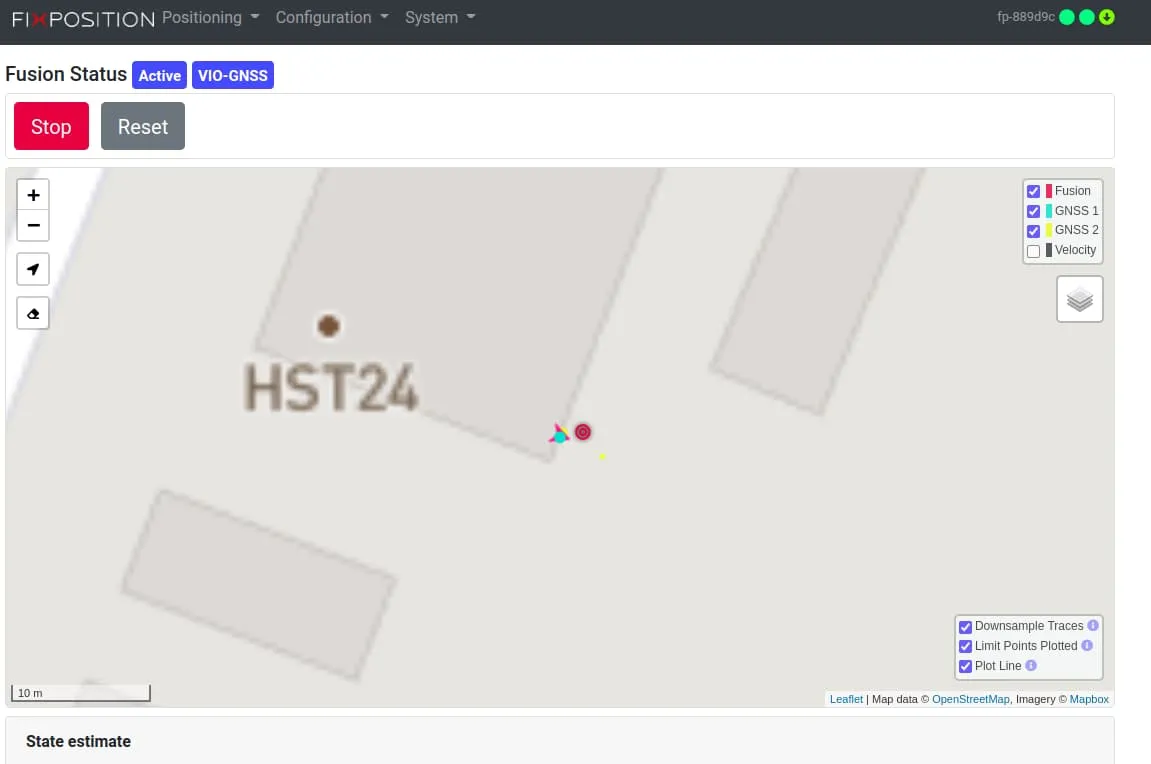
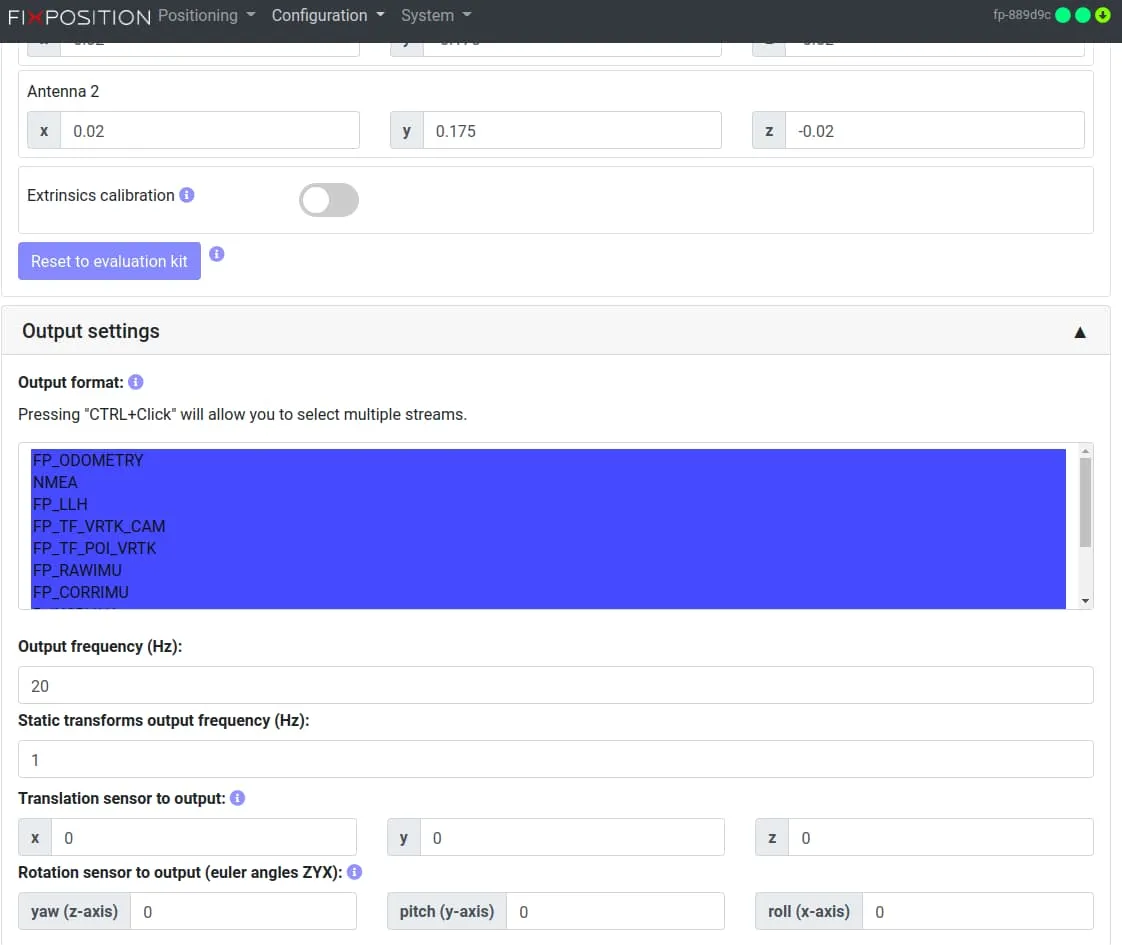
The fusion output and startup can be configured via clicking
ConfigurationandFusion.
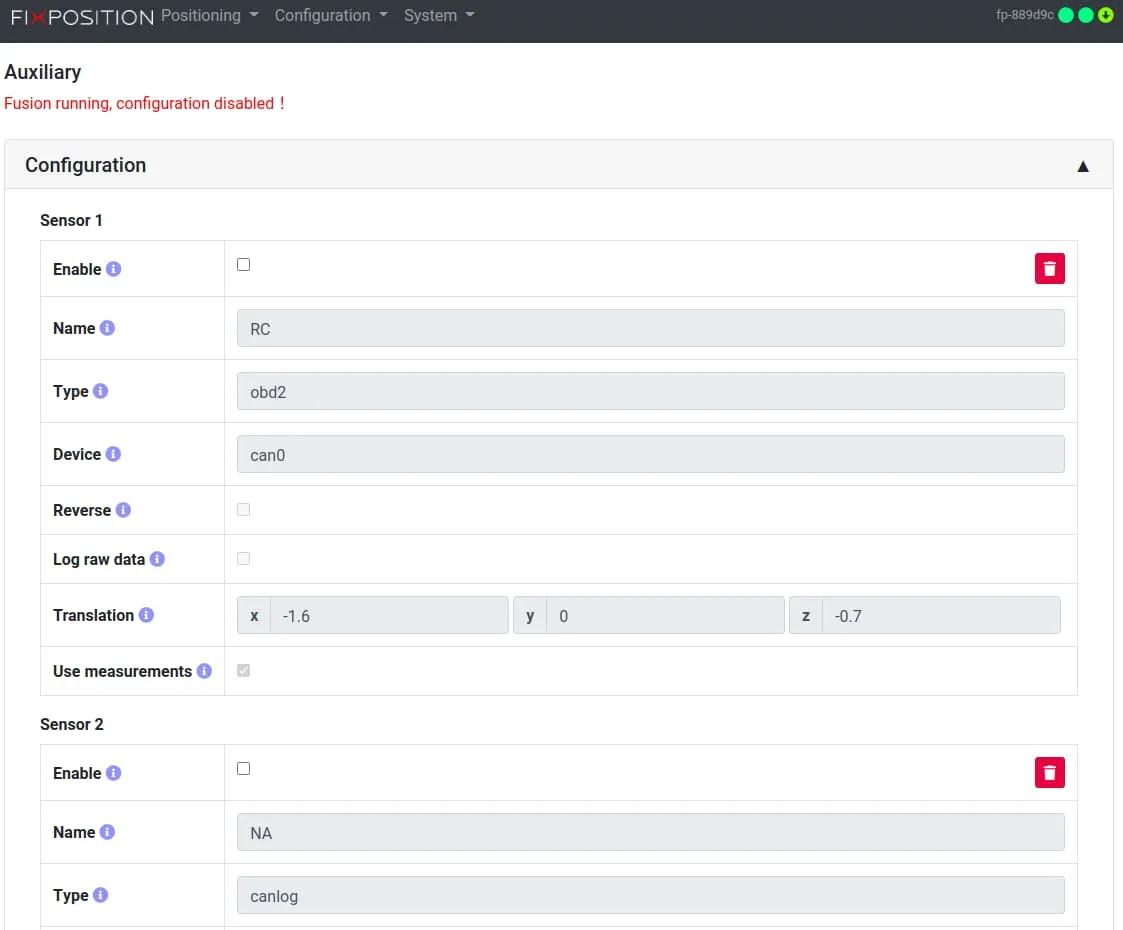
At this stage the Fixposition is providing a stream which the ROS driver can use. Incase that you wish to fuse other sensors with the Fixposition it can be done, by clicking
SystemandAuxiliary.
Note
In the latest version be sure to put the TCP0 to output the GNSS information as well.