Fixposition Operation

Fixposition can be operated via serial mode, WiFi mode, or LAN mode. Our recommendation is to connect and use the LAN mode for operation of Fixposition with the robot.
Fixposition Serial
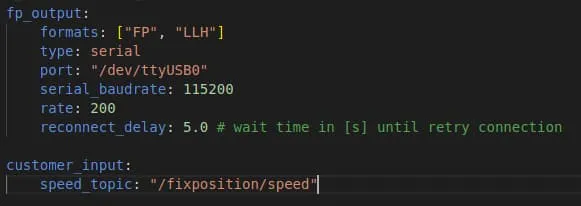
Configure the connection port:
roscd fixposition_driver/launch/
gedit serial.yaml
Ensure that the port in the
yaml fileof the Fixposition corresponds correctly to where it is connected.
To launch the node in serial mode, run:
roslaunch fixposition_driver serial.launch
Fixposition WiFi
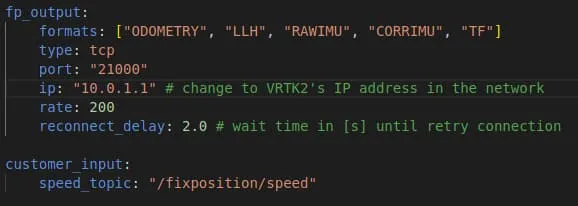
Configure the connection port:
roscd fixposition_driver/launch/
gedit tcp.yaml
Ensure that the ip in the
yaml fileof the Fixposition is10.0.1.1. Extra information can be acquired via the formats. For more information on the output data from the Fixposition receiver, please refer to the manual or the Github.
To launch the node in tcp mode WiFi, run:
roslaunch fixposition_driver tcp.launch
Fixposition LAN (Recommended)
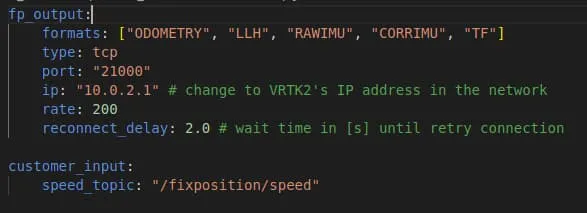
Configure the connection port:
roscd fixposition_driver/launch/
gedit tcp.yaml
Ensure that the ip in the
yaml fileof the Fixposition is10.0.2.1. Extra information can be acquired via the formats. For more information on the output data from the Fixposition receiver, please refer to the manual or the Github.
To launch the node in tcp mode LAN, run:
roslaunch fixposition_driver tcp.launch
Important
Further configuration information is provided in the user integration manual. This manual comes with the Fixposition device. Incase the manual is not available, please request from info@fixposition.com