ROS2 Humble
⇒ Reason of ROS2 (T)
Understanding the motivation and objectives behind the development of ROS2.
⇒ Key differences (T)
Exploring key differences between ROS1 and ROS2.
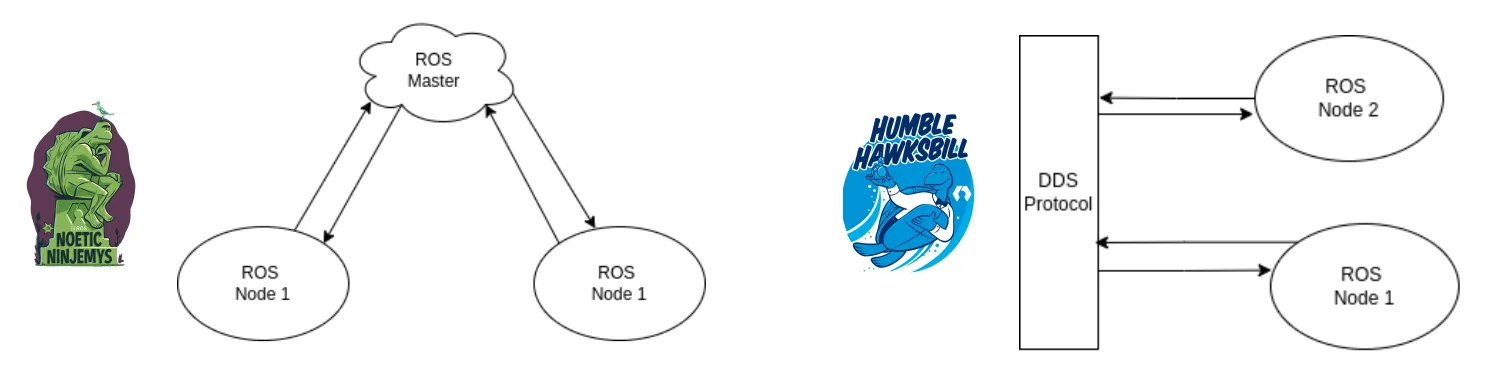
⇒ New architecture (T)
Introduction to the new architecture and design principles of ROS2.
⇒ Why DDS? and its Robustness and longevity! (T)
Explanation of Data Distribution Service (DDS) and its importance in ROS2 communication.
⇒ ROS2 Control (Brief Overview) (T)
Brief overview of ROS2 control mechanisms for robotic systems.
⇒ ROS2 Package Build (T)
Building ROS2 packages for developing and deploying ROS2 applications.
⇒ ROS Bridge (T)
Understanding ROS Bridge for communication between ROS1 and ROS2.
⇒ ROS2 Simulation (P)
Simulating ROS2 environments and robotic systems.
⇒ ROS2 Create Package (P)
Creating ROS2 packages for organizing and distributing ROS2 software.
ROS2 Nodes
⇒ ROS2 nodes (T/P)
Understanding ROS2 nodes and their lifecycle in ROS2 applications.
ROS2 Launch Files
⇒ ROS2 launch files (T)
Overview of ROS2 launch files for launching and configuring ROS2 nodes.
⇒ Create ROS2 Node (P)
Creating custom ROS2 nodes for specific tasks.
⇒ Create ROS2 Launch file (P)
Creating launch files for launching multiple ROS2 nodes simultaneously.
⇒ ROS2 Sensor Fusion (P)
Implementing sensor fusion techniques in ROS2 for perception tasks.
ROS2 Parameters
⇒ Item Differences (T)
Discussing differences in ROS2 parameters, messages, services, and action servers compared to ROS1.
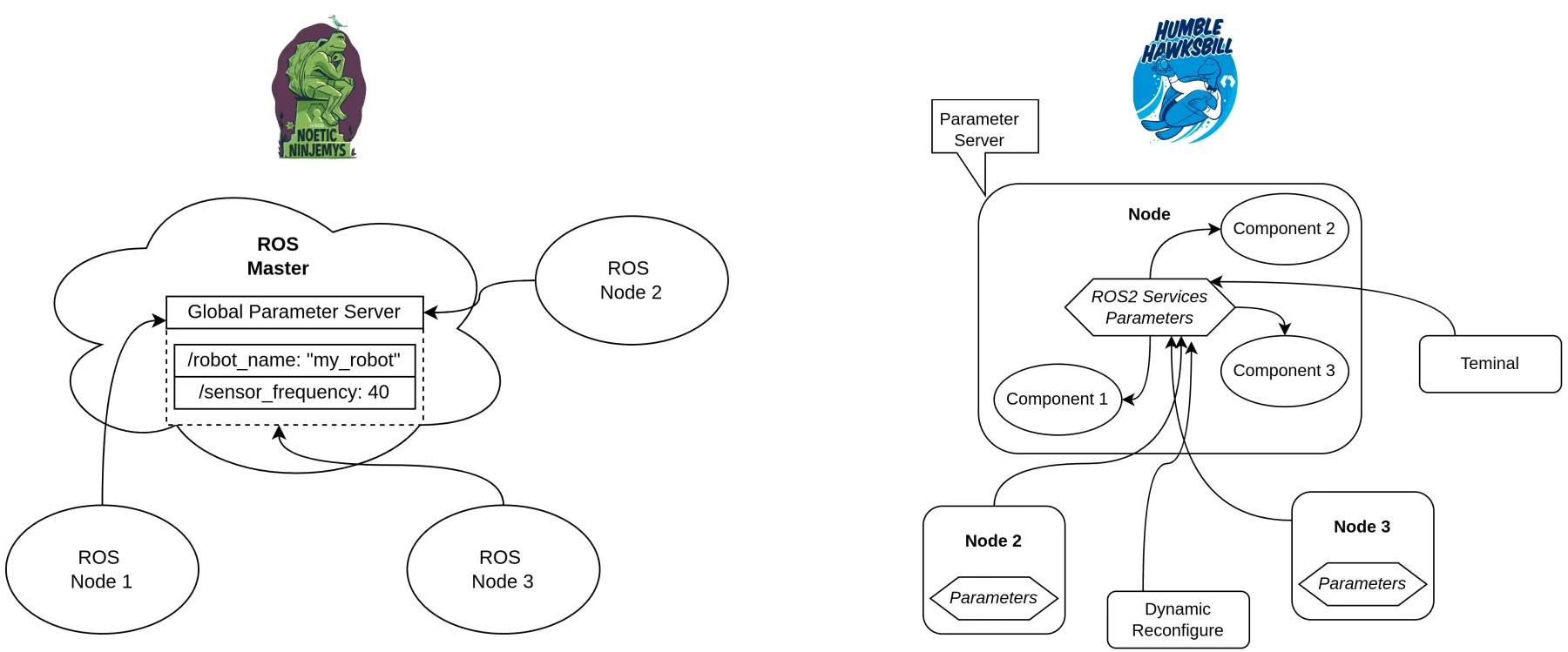
⇒ ROS2 Parameters (T/P)
Explanation of ROS2 parameter server and usage of parameters in ROS2 nodes.
⇒ Create ROS2 Parameter Loading (P)
Loading and using ROS2 parameters in ROS2 nodes.
ROS2 Msgs
⇒ ROS2 Messages (T/P)
Understanding the structure and use of messages in ROS2.
⇒ Creating Custom Messages (P)
Defining and implementing custom message types for ROS2 applications.
⇒ Message Communication (T/P)
Exploring message passing between ROS2 nodes and ensuring efficient data exchange.
ROS2 Services
⇒ ROS2 Services (T/P)
Overview of services in ROS2 and their role in synchronous communication.
⇒ Creating Custom Services (P)
Defining and implementing custom services for specific tasks in ROS2.
⇒ Service Communication (T/P)
Setting up and handling service requests and responses between ROS2 nodes.
ROS2 Actions
⇒ ROS2 Actions (T/P)
Understanding the concept of actions in ROS2 and their use in handling long-running tasks.
⇒ Creating Custom Actions (P)
Defining and implementing custom action types for ROS2 applications.
⇒ Action Communication (T/P)
Implementing action clients and servers to handle goals, feedback, and results.
ROS2 Navstack
⇒ Differences (T)
Exploring differences between ROS1 and ROS2 navigation stacks.
⇒ Setup (P)
Setting up ROS2 Navigation Stack for autonomous robot navigation.
⇒ Mapping (P)
Mapping environments using ROS2 Navigation Stack.
⇒ Localization (P)
Localizing robots within mapped environments using ROS2 Navigation Stack.
⇒ Planner Tuning (P)
Tuning motion planners for efficient navigation using ROS2 Navigation Stack.
⇒ Custom Robot Integration (P)
Integrating custom robot hardware with ROS2 Navigation Stack.
⇒ Debugging (P)
Debugging and troubleshooting issues in ROS2 Navigation Stack.
⇒ Tools Usage (P)
Utilizing tools and utilities for ROS2 Navigation Stack development.
ROS2 Pitfalls
⇒ Issues faced
Sharing personal experiences and challenges encountered during ROS2 development.
⇒ Debugging
Strategies and techniques for debugging ROS2 software and robotic systems.
⇒ Tools Usage
Overview of useful tools and utilities for ROS2 development and debugging.