MMP Husky UR5e + Robotiq 2F-140
To power-on the UR5e and Robotiq 2F-140 completely, run:
ros2 service call /a200_1025/ur5e/activation/hsky_nano/srv/SerialBoolean "{data: true}"
Launch ROS2 driver for UR5e as well as Robotiq 2F-140:
ros2 launch hsky_manipulation ur5e_robotiq.launch.py
To test the UR5e and gripper you can use Moveit2:
ros2 launch hsky_ur_moveit ur_moveit.launch.py
To power-off the UR5e and Robotiq 2F-140 completely, run:
ros2 run hsky_manipulation remote_shutdown.py
Important
The hsky_manipulation driver should be running when executing the shutdown procedure.
MMP Husky Viz
To visualize the Husky, you can run:
ros2 launch hsky_viz view_robot.launch
MMP Husky Hokuyo
The Hokuyo is on by default from the startup job. To launch the Hokuyo only:
ros2 launch hsky_lidars system.launch.py

Hokuyo
Warning
Do not run this command, as this is running in the background on startup via the hsky startup job.
MMP Husky Navigation
Navi2 — Odom Navigation
Navigate in the global frame of map
ros2 launch hsky_nav2 odom_navi.launch.py
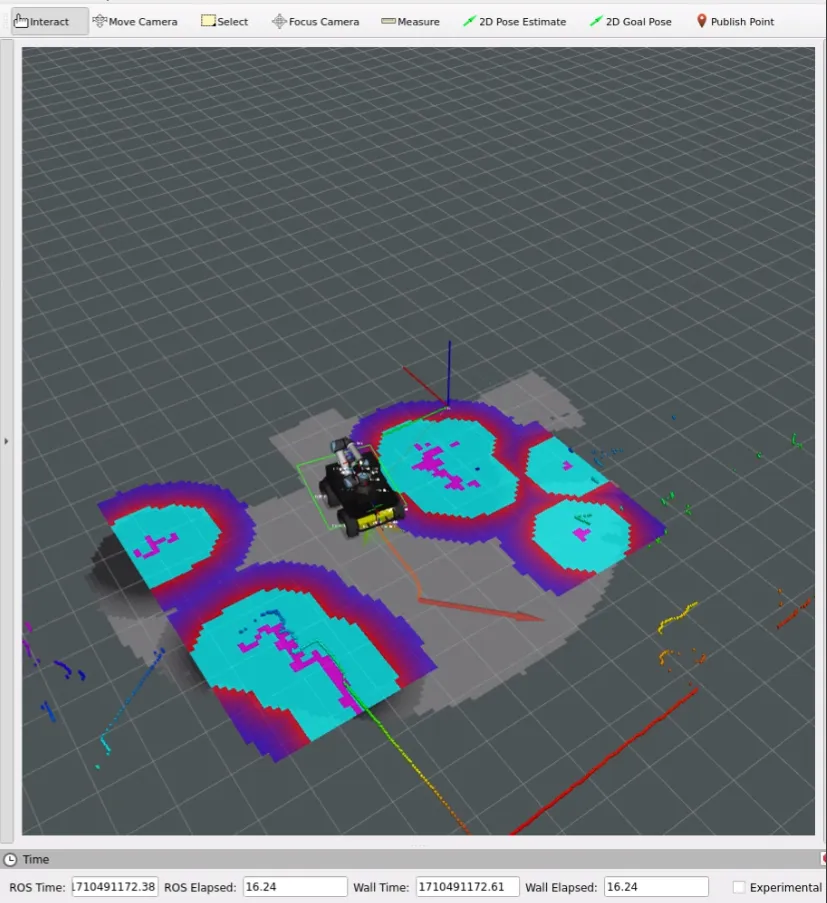
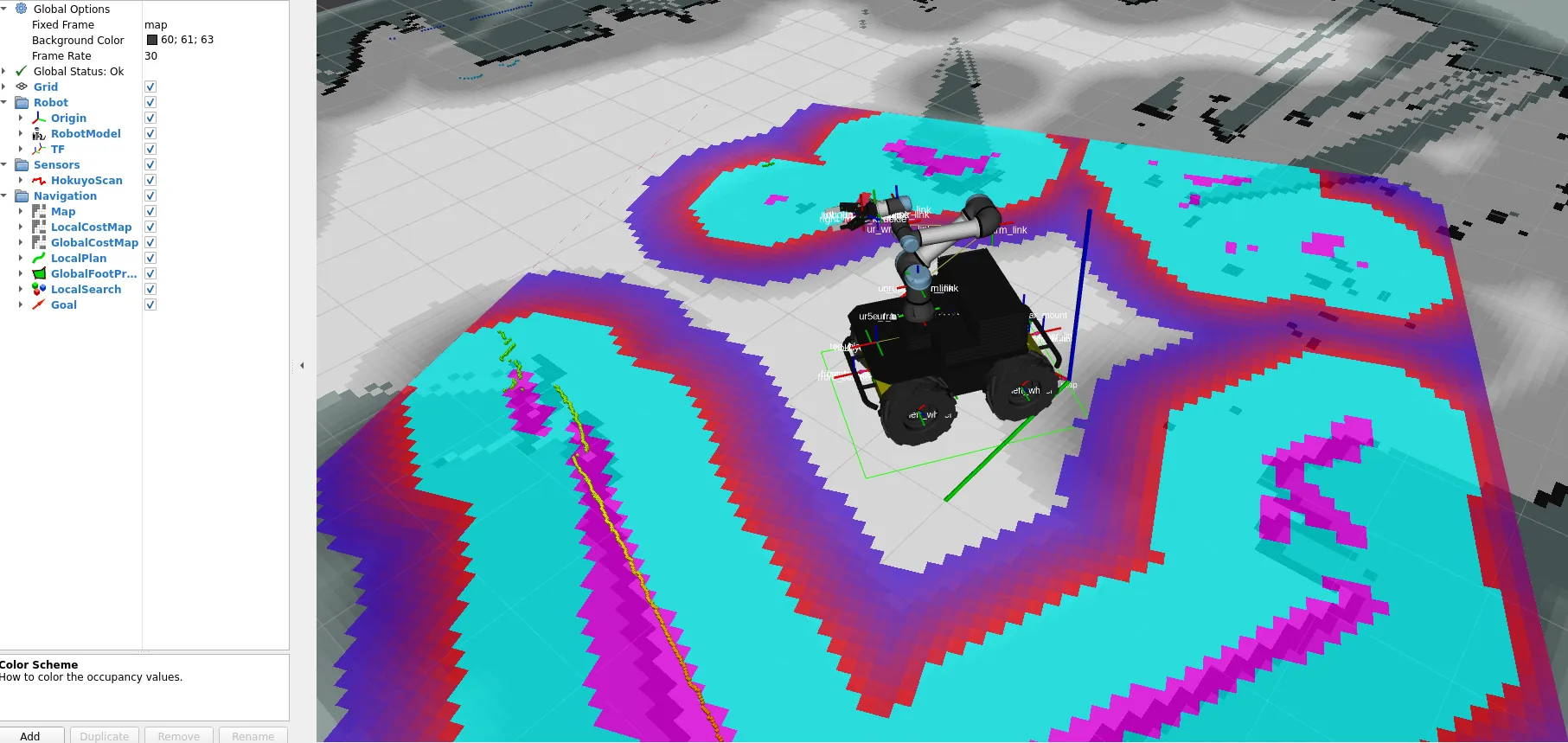
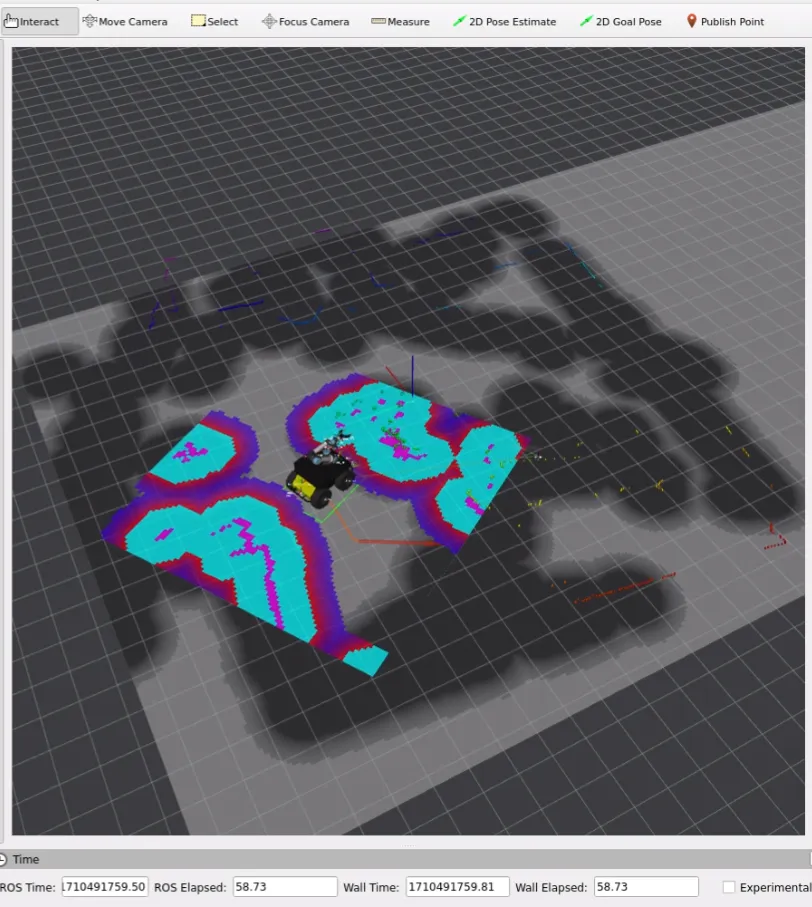
Odom Based Navigation: After launching the drivers and commands, providing a 2D navigation goal in RViz initiates the navigation process. The brown arrow indicates the 2D navigation goal, while the small orange line represents the global planner and the green arrows depict the local planner. The green box surrounding the robot signifies the bounding box. In the map, blue areas represent the local cost map, and the grey area corresponds to the global cost map
Navi2 — Mapping
Mapping
Mapping can begin using the joystick controller:
ros2 launch hsky_nav2 slam.launch.py
Once you are satisfied with your map you can export it by running the following command in one of the Huskys terminals:
ros2 run nav2_map_server map_saver_cli -f /home/administrator/ros2_ws/src/mybotshop/hsky_nav2/maps/custom_map
Rebuild the husky nav2 so that the maps can be installed in the install folder:
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release
Note
The rebuilding step is not required if the filename is not changed.
Navi2 — Map Navigation
ros2 launch hsky_nav2 map_navi.launch.py
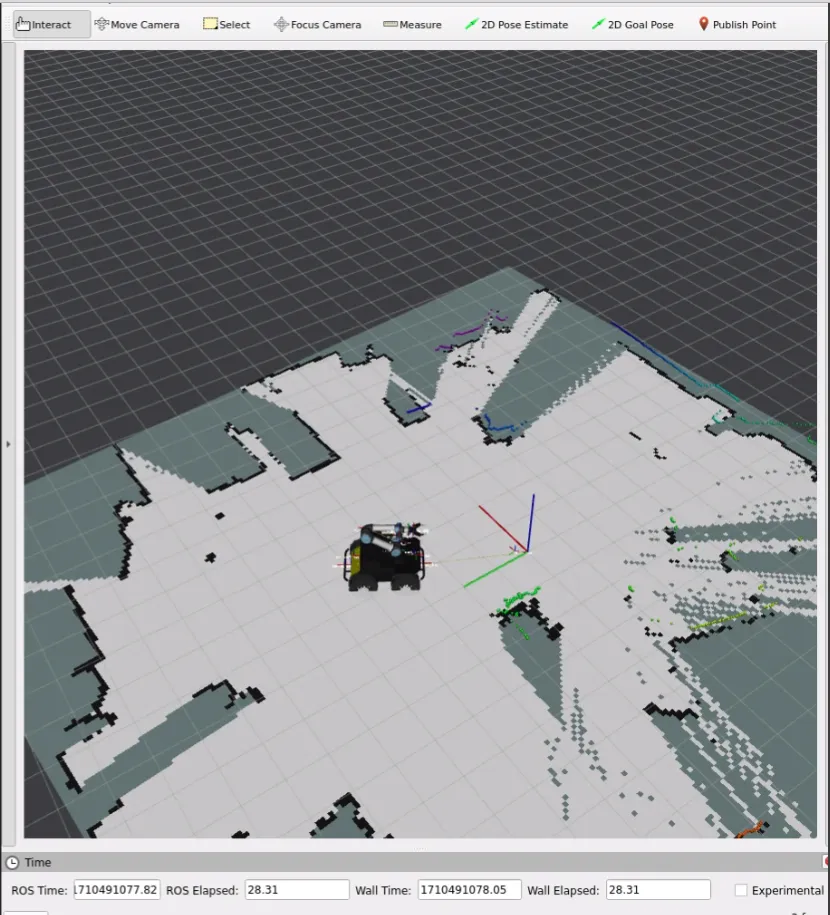
Map Based Navigation: After launching the drivers and commands, providing a 2D pose estimate in RViz in the Map frame initiates map navigation