1100 :: Husky
Important
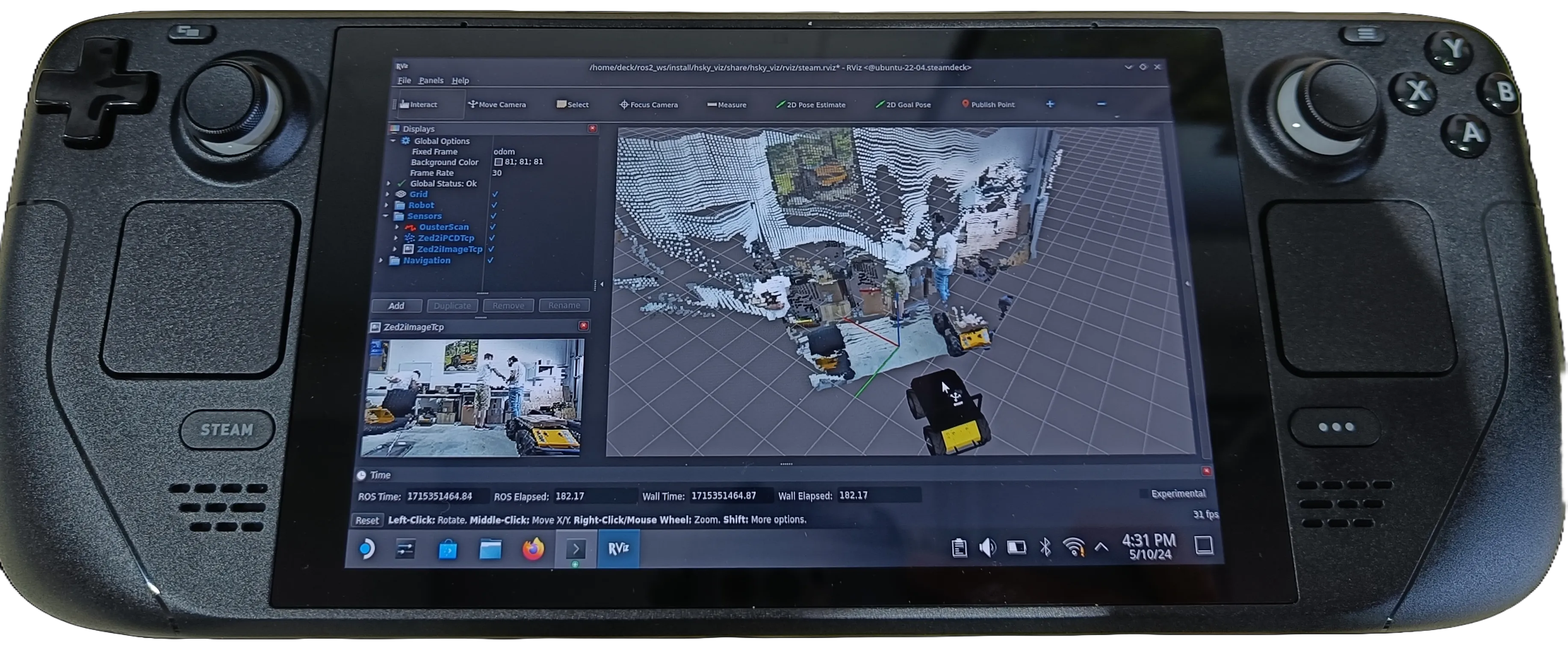
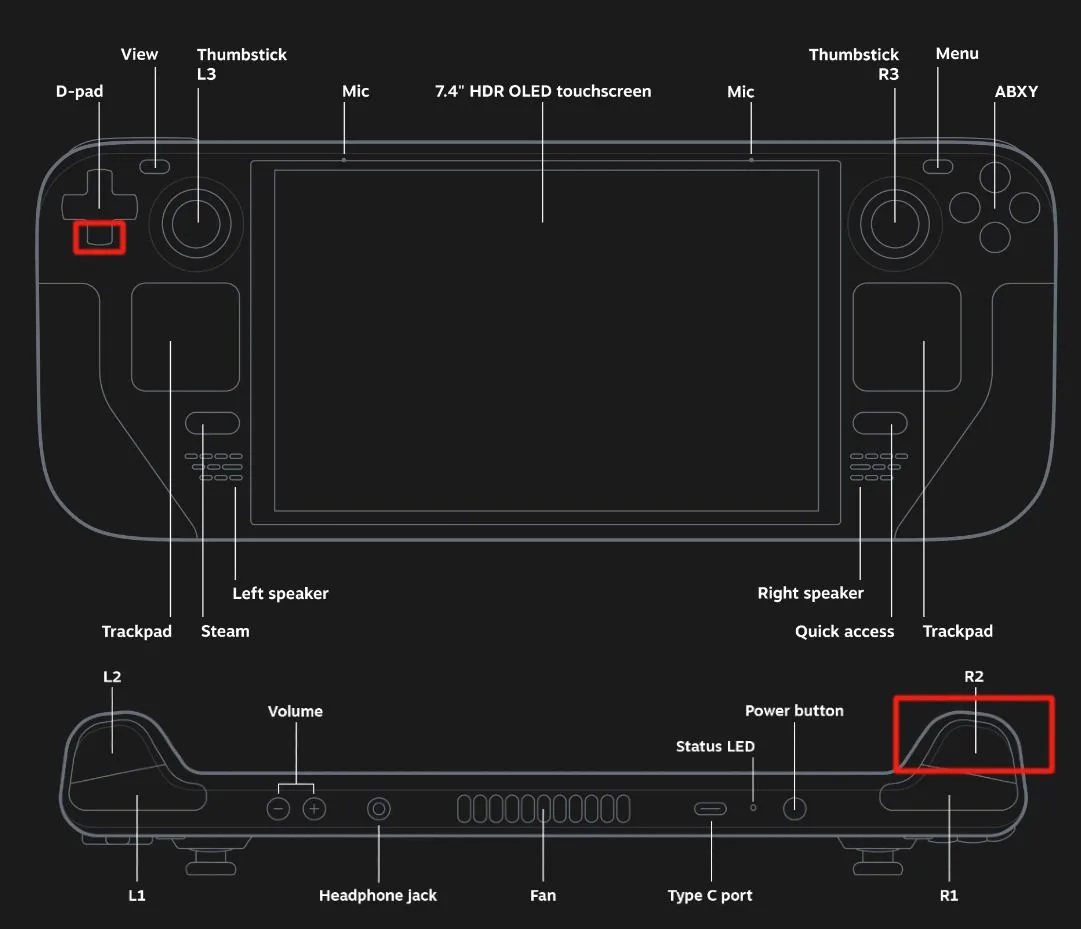
The following instructions are for the Husky GE model.
Sensors Activation
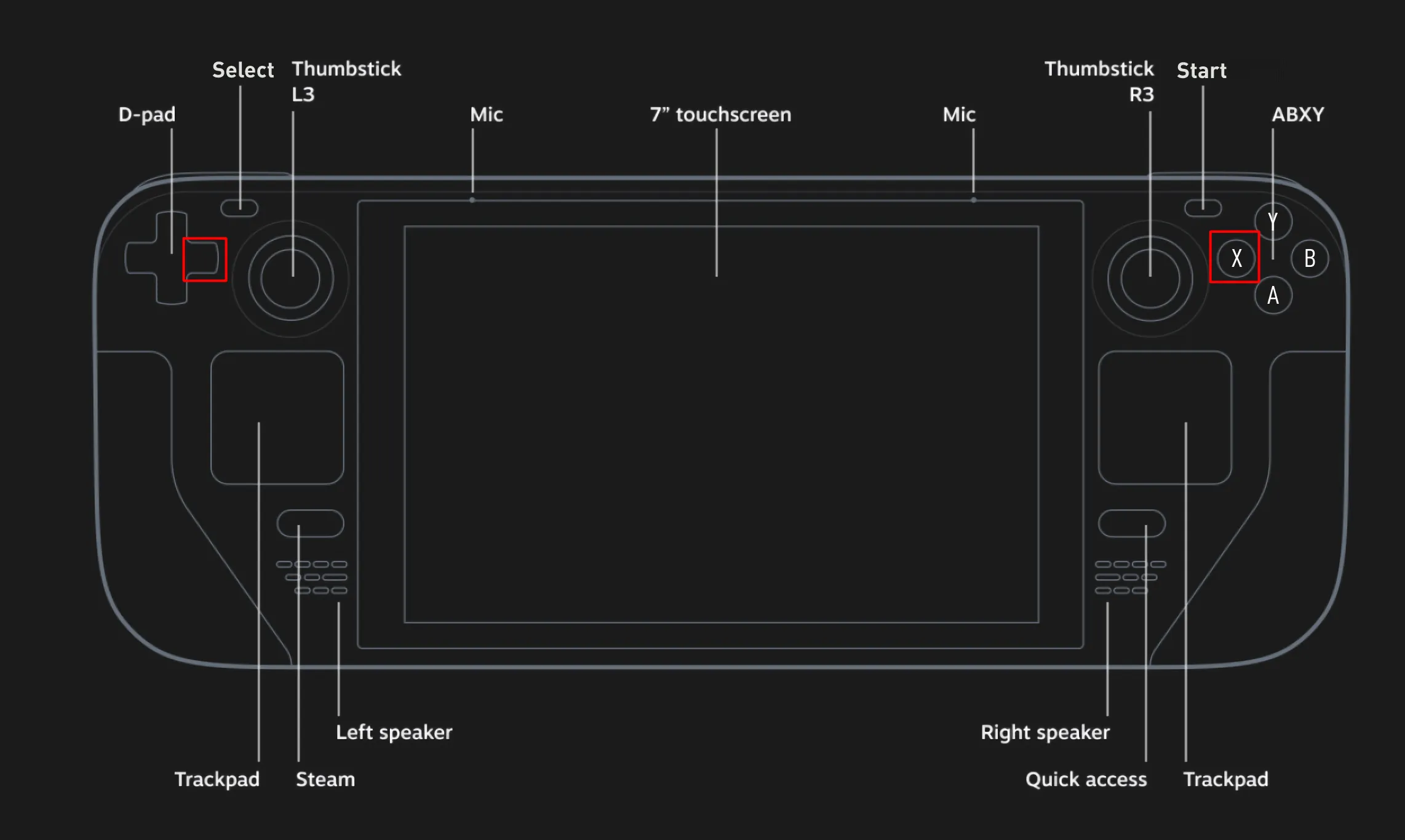
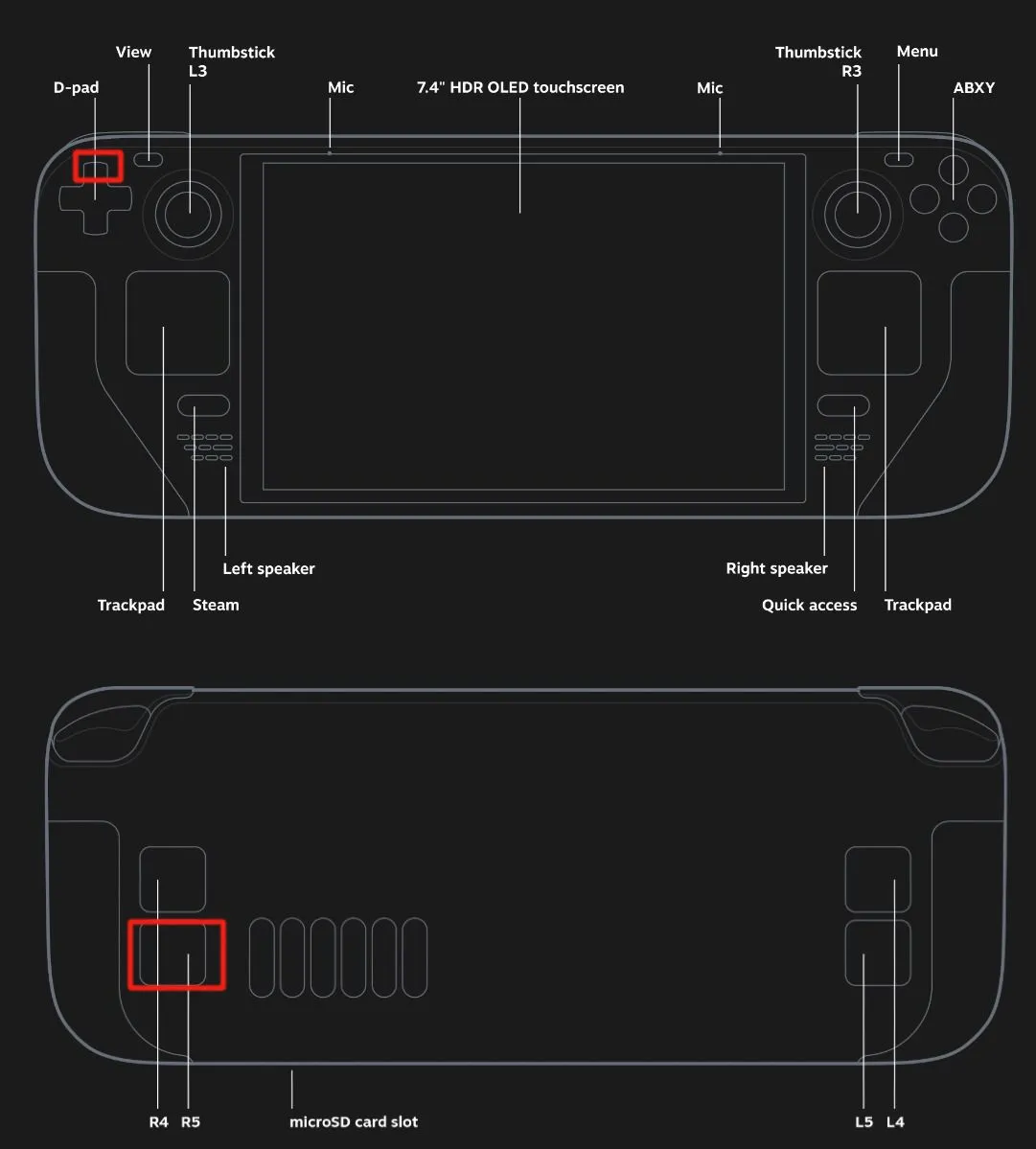
Press A + Up arrow to restart the Husky driver.
Use B + Up arrow to activate TCP tunnel 2.
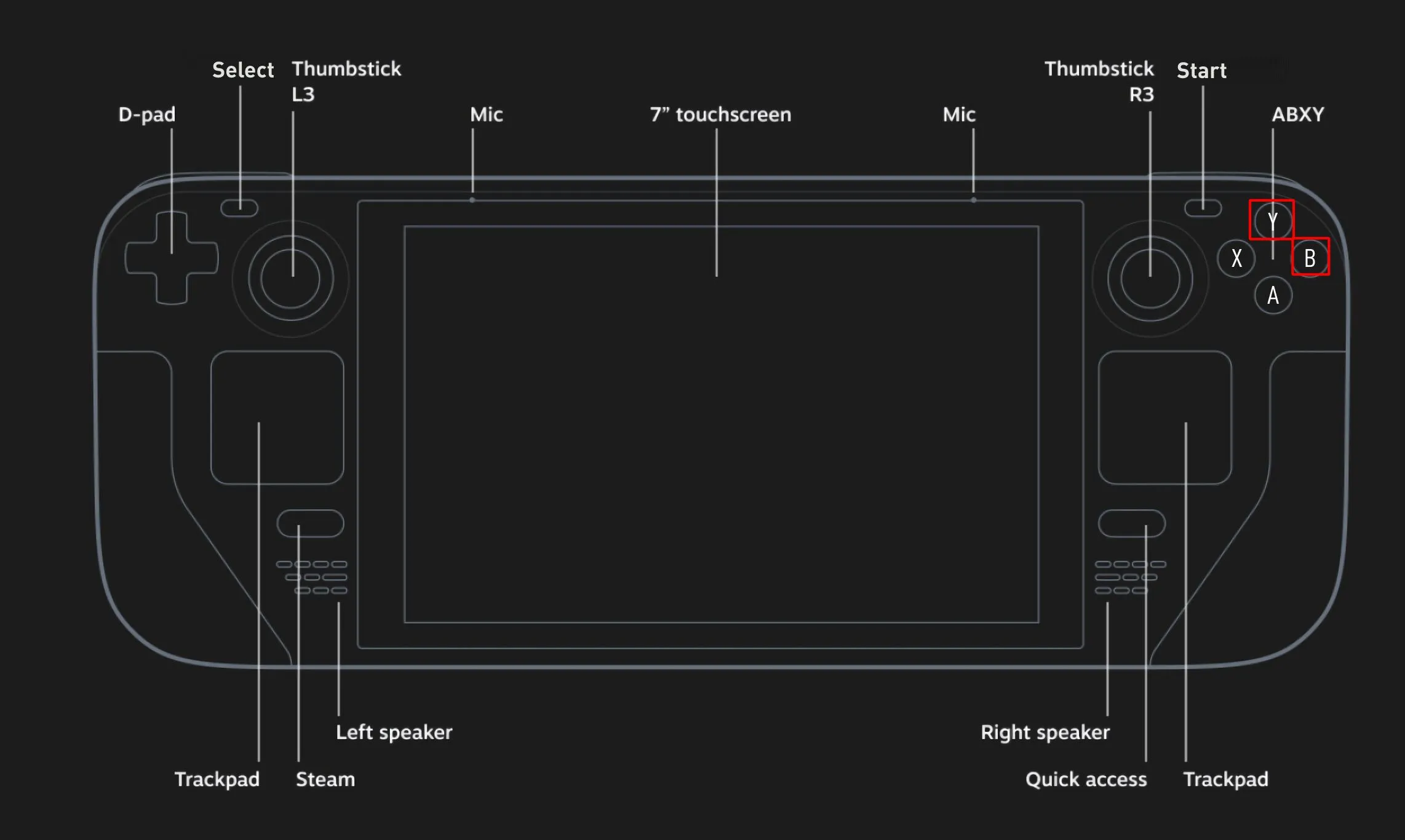
Press Y + Up arrow to activate the ZED2i Depth camera.
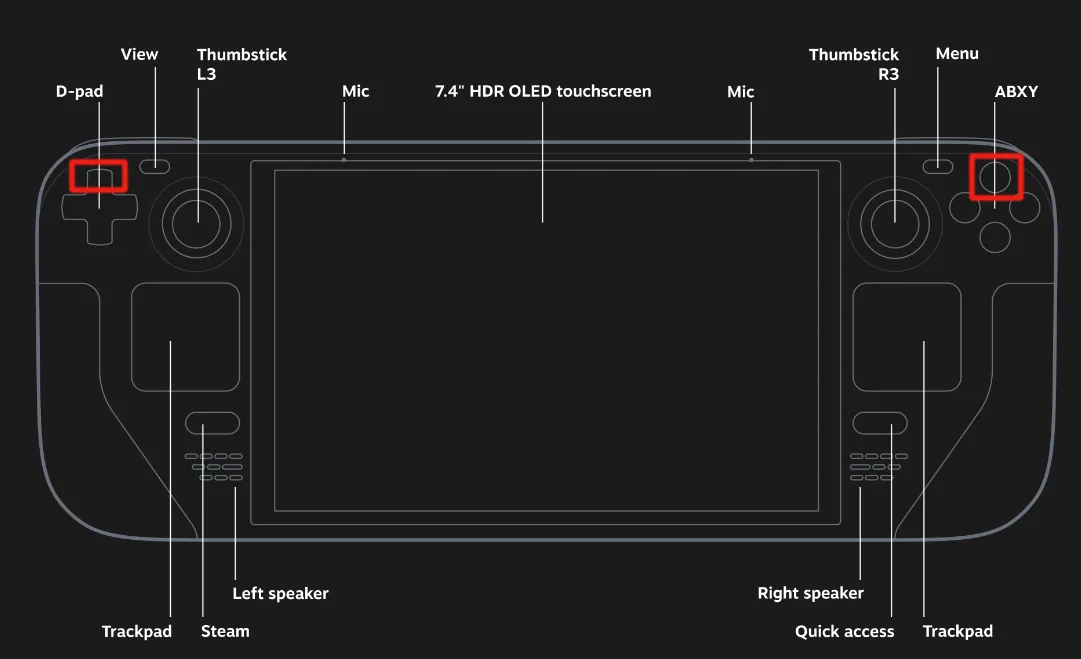
Use Y + Down arrow to deactivate the ZED2i Depth camera.
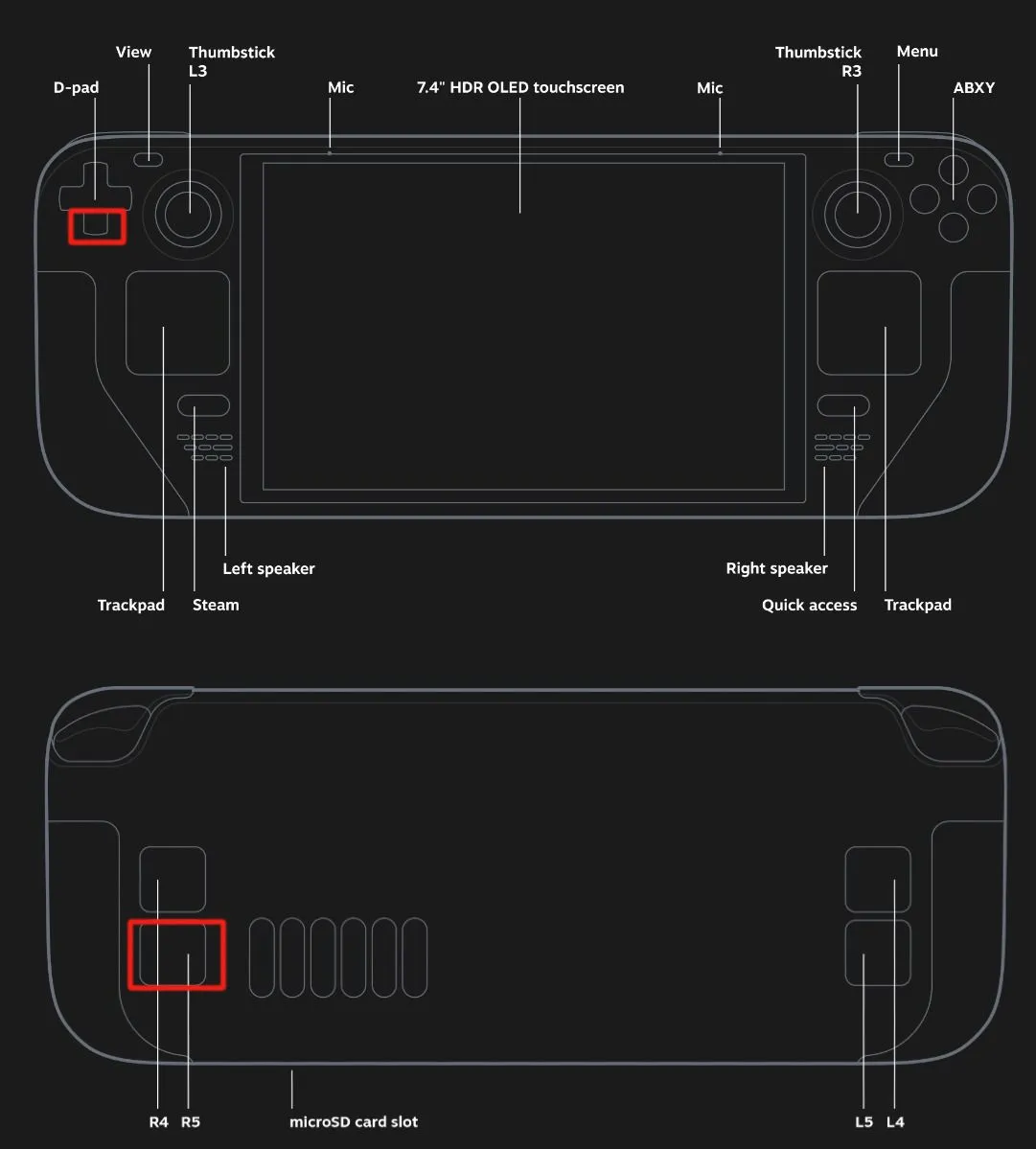
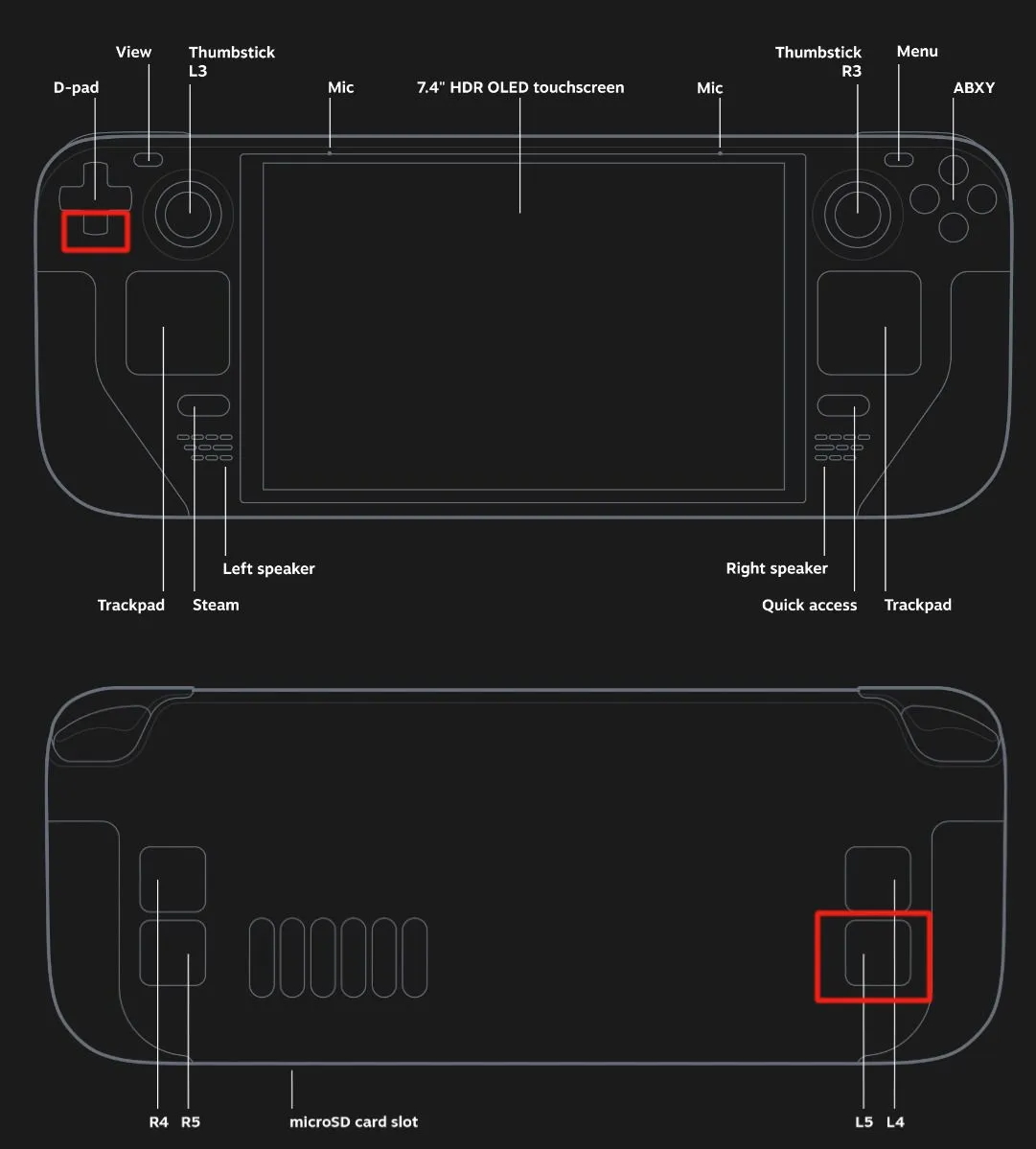
Press R4 + Up arrow to activate the Ouster Lidar.
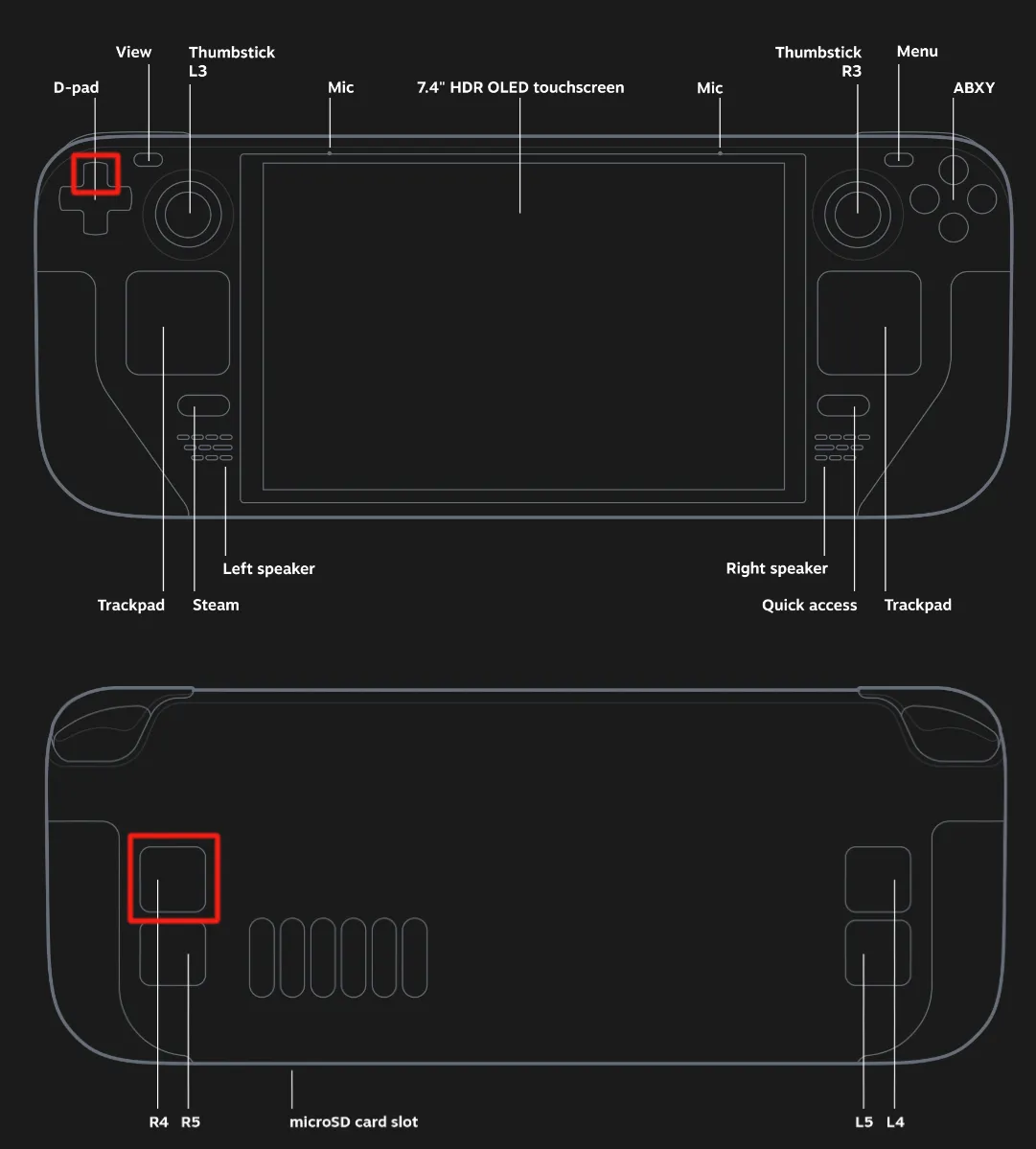
Use R4 + Down arrow to deactivate the Ouster Lidar.
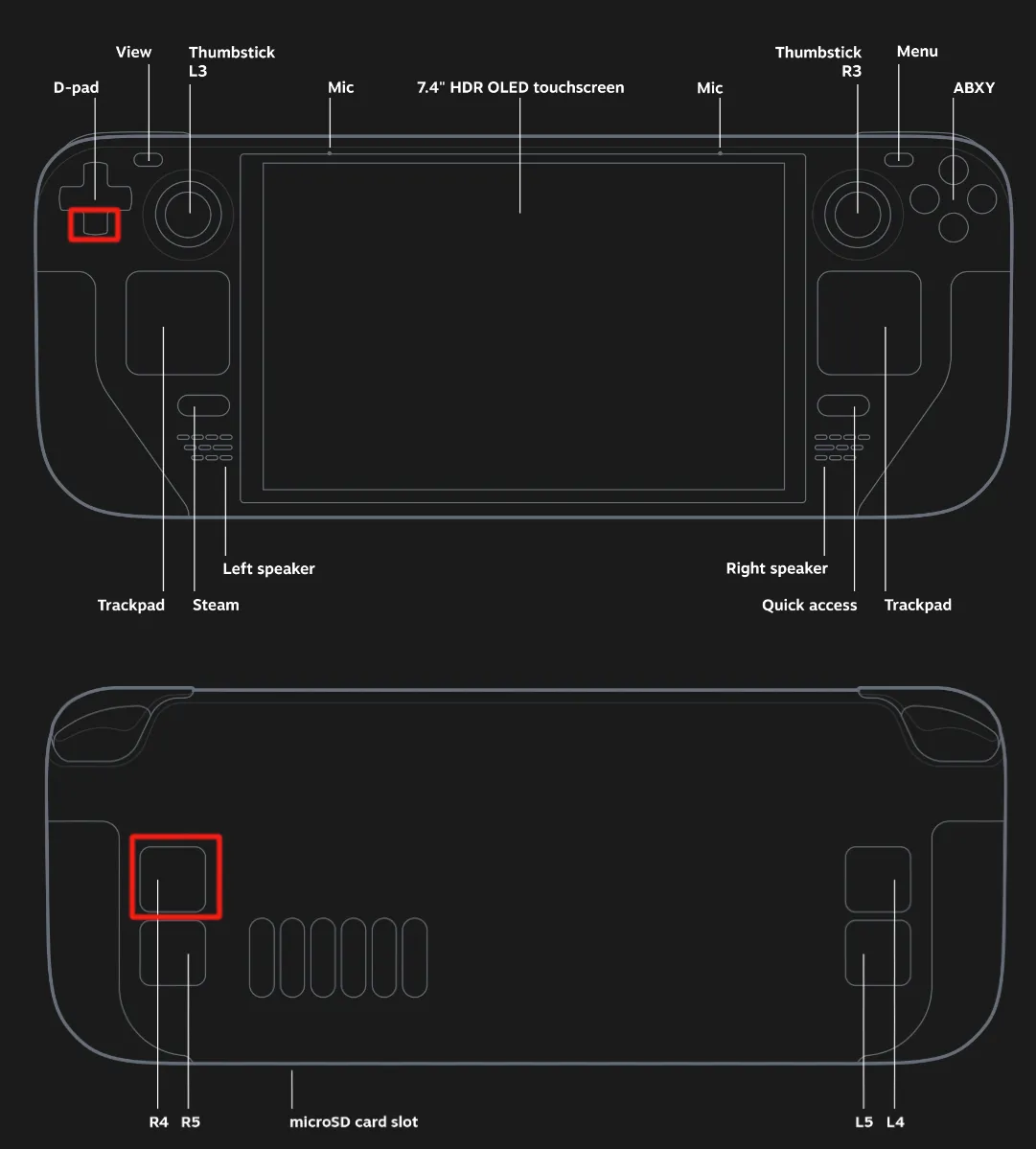
Press R5 + Up arrow to activate the Robosense Lidar.
Use R5 + Down arrow to deactivate the Robosense Lidar.
Press L4 + Up arrow to activate the Fixposition GPS.
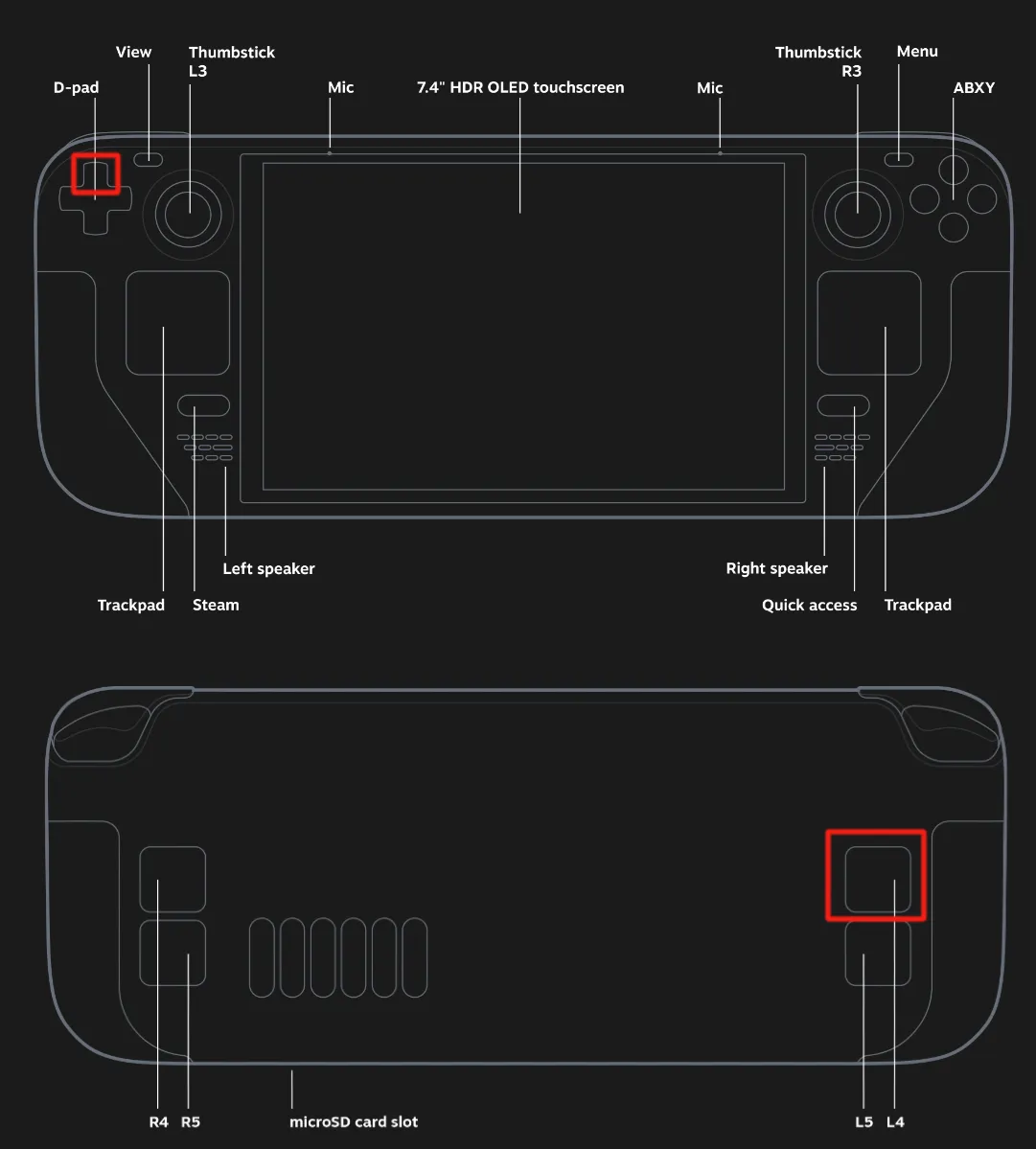
Use L4 + Down arrow to deactivate the Fixposition GPS.
Press L5 + Up arrow to activate the EMLID RS2 GPS.
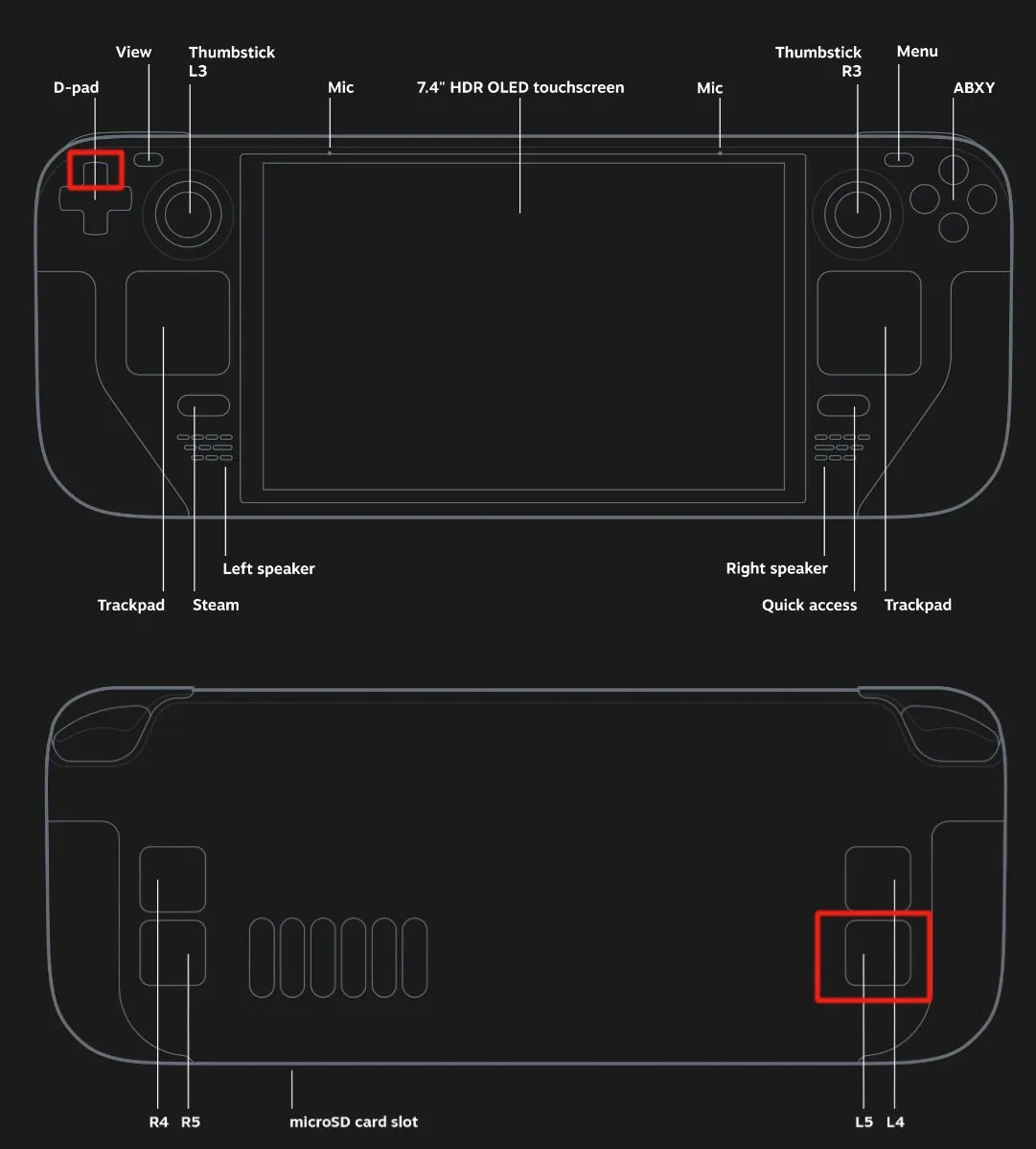
Use L5 + Down arrow to deactivate the EMLID RS2 GPS.
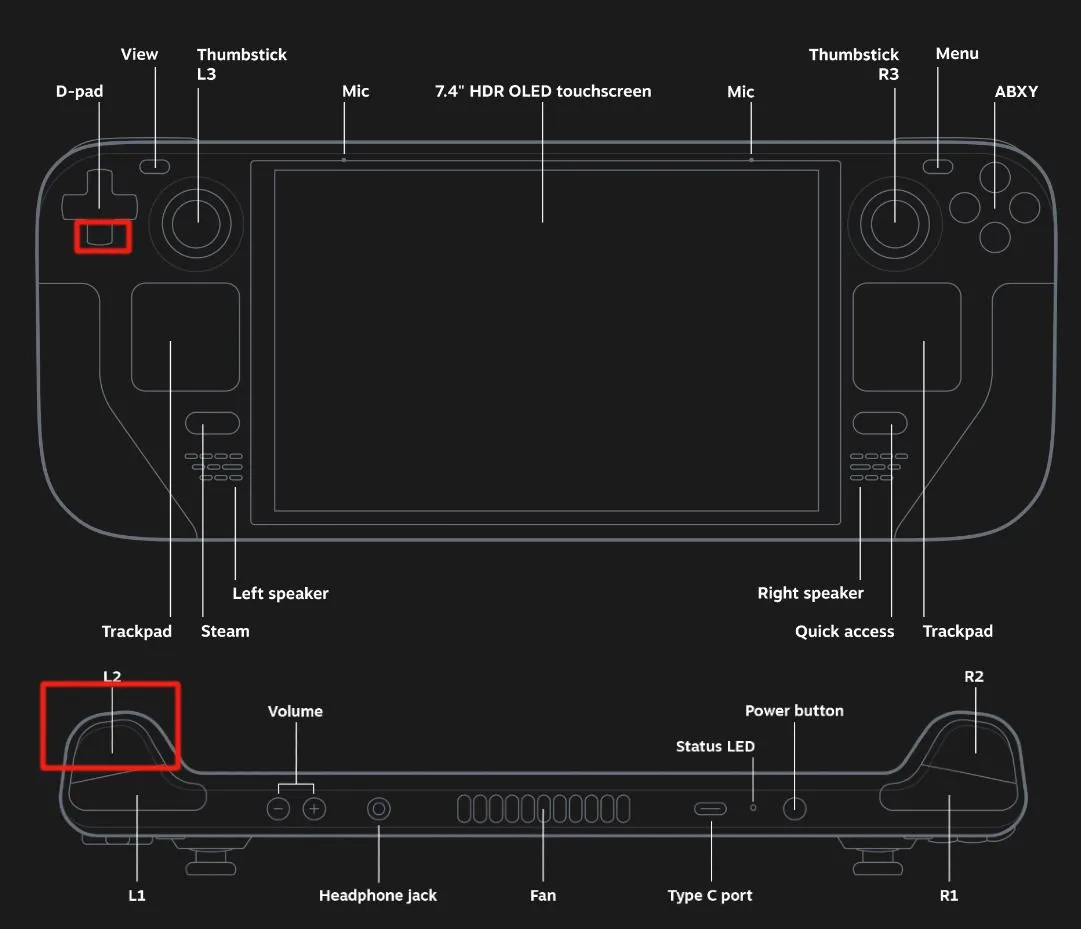
Press L2 + Up arrow to activate the Intel Realsense I.
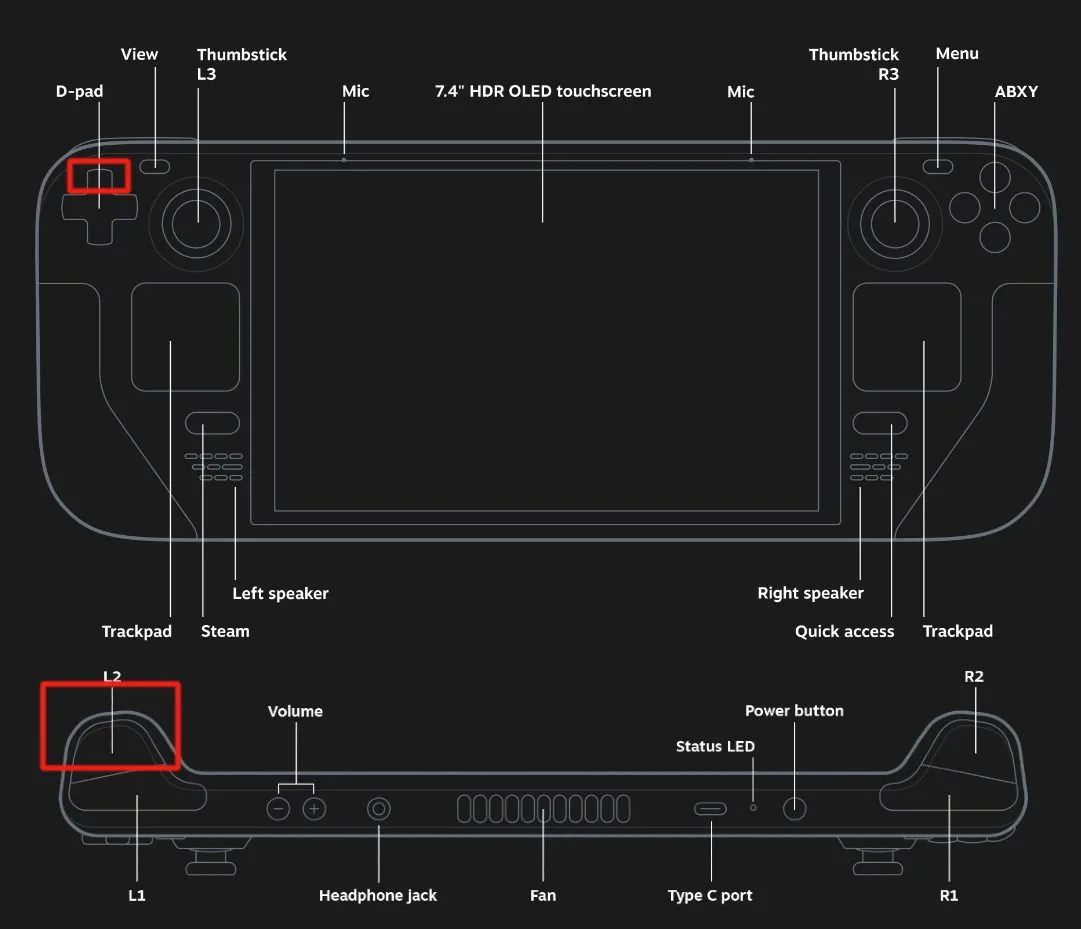
Use L2 + Down arrow to deactivate the Intel Realsense I.
Press R2 + Up arrow to activate the Intel Realsense II.
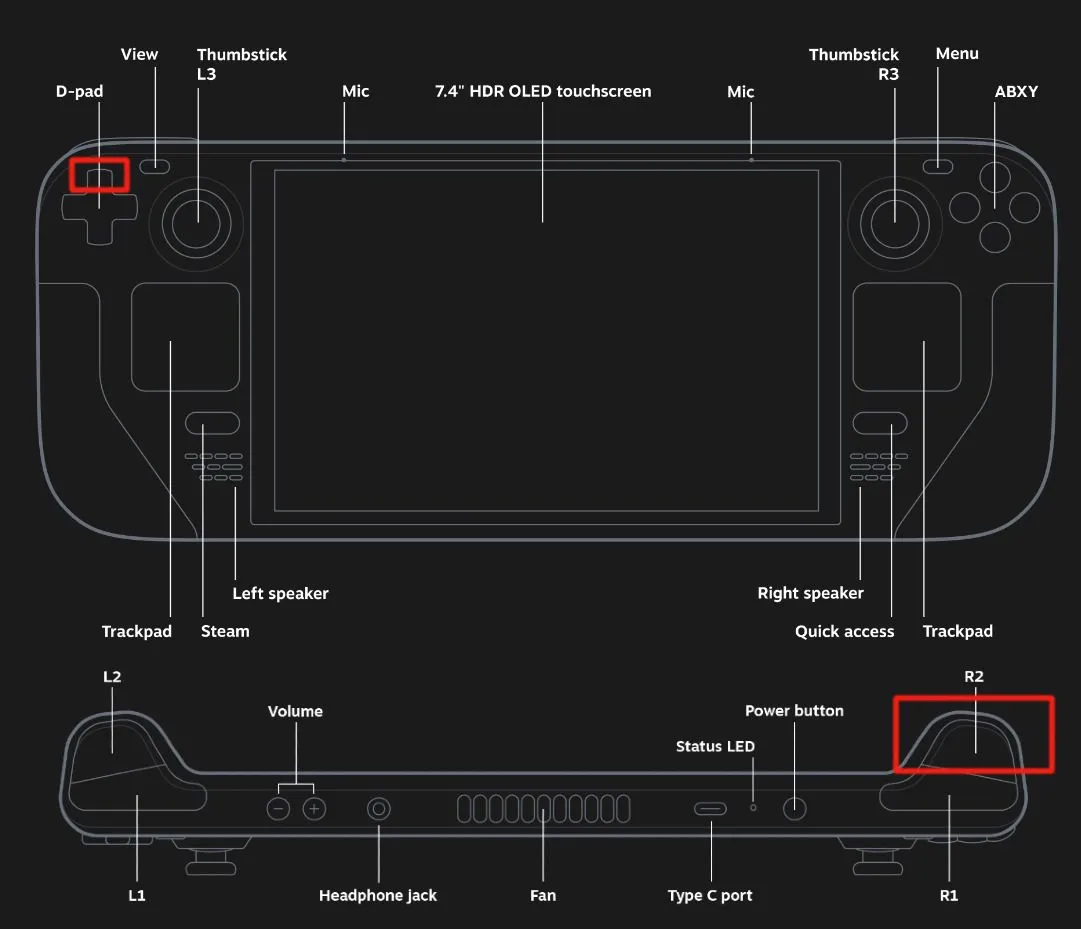
Use R2 + Down arrow to deactivate the Intel Realsense II.
Record ROS2 Bag
The ros2 bag topics that you want to add/remove/configure can be done by editing the topics required for the Husky Steamdeck. For this, in the Steamdeck Computer go to the file:
/home/deck/ros2_ws/src/mybotshop/hsky_steamdeck/config/steamdeck.yaml
Note
The ros2 bag storage size, and max duration can also be configured from this file.
Be sure to restart the Steamdeck driver to ensure the changes have taken place. To change the save file location, in the Husky PC go to:
/home/administrator/ros2_ws/src/mybotshop/hsky_utils/config/hsky_utils.yaml
By default, this is configured to save on the provided external hard drive.
B + A Start Recording ROS2 bags
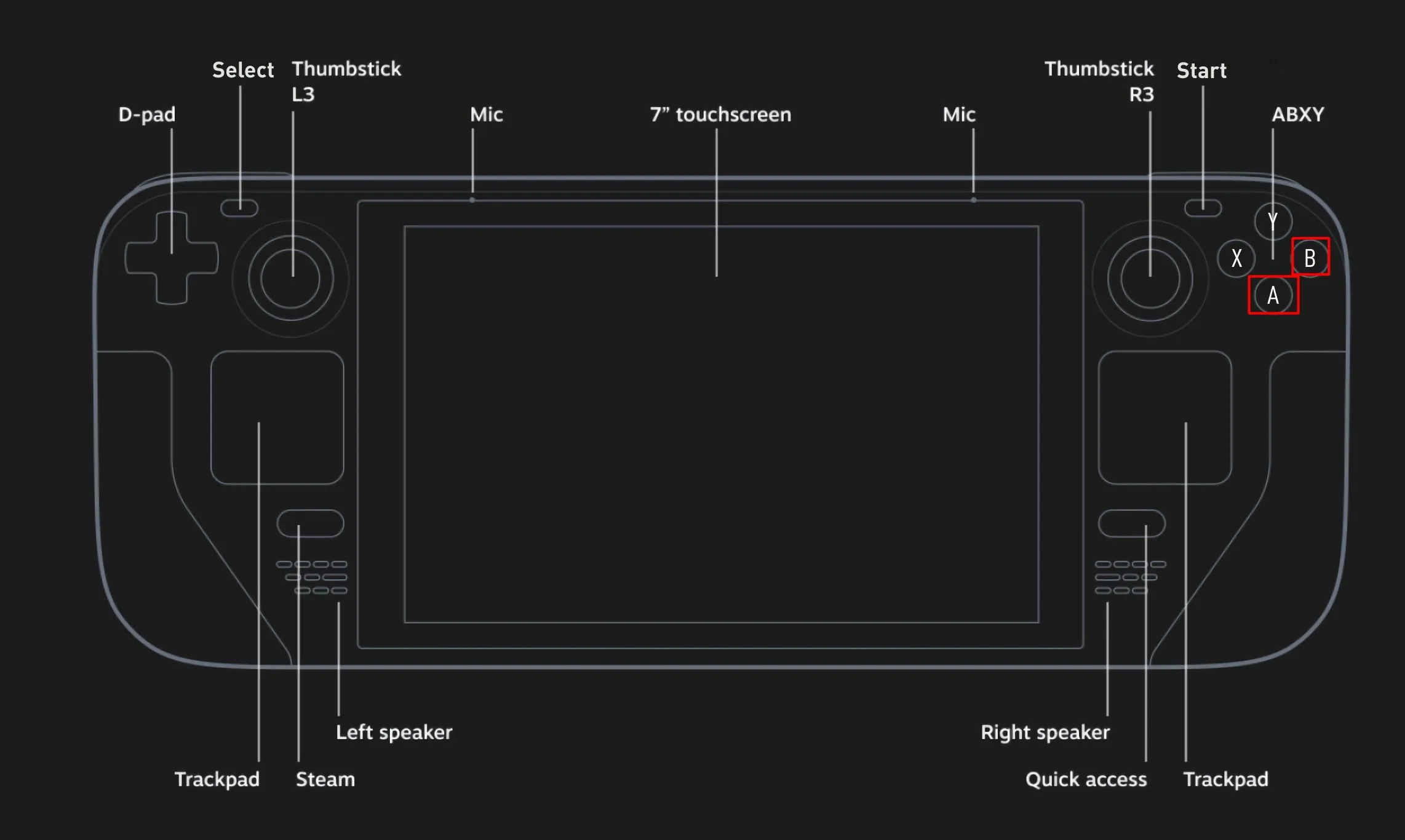
B + Y Save Recording ROS2 bags in external hard drive.
Important
Once the recording for the ROS2 bag has started please restart the husky drivers once by pressing A + Up arrow. Once you have stopped recording please wait for 2-5 mins depending on the length of the record as it takes time for the on-board PC to save data.
Note
The Ros2 bag files will be saved automatically on the external hard drive with the recording date and time as the file’s name. You can see all the files in the directory /media/…
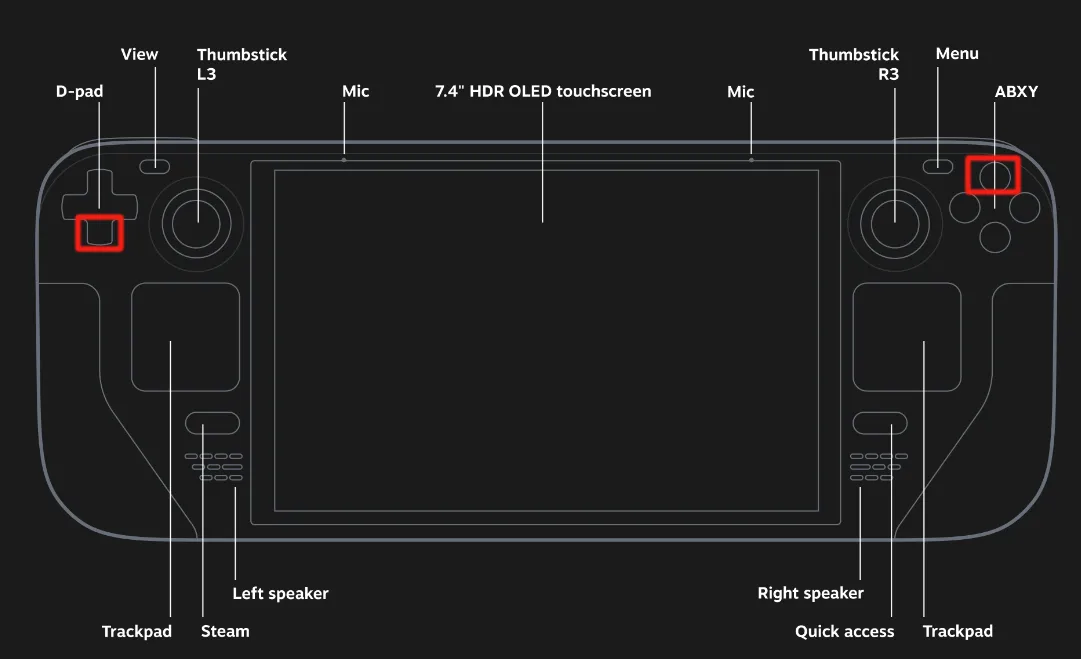
GPS Waypoint
X + Up arrow to record current locations GPS waypoint.
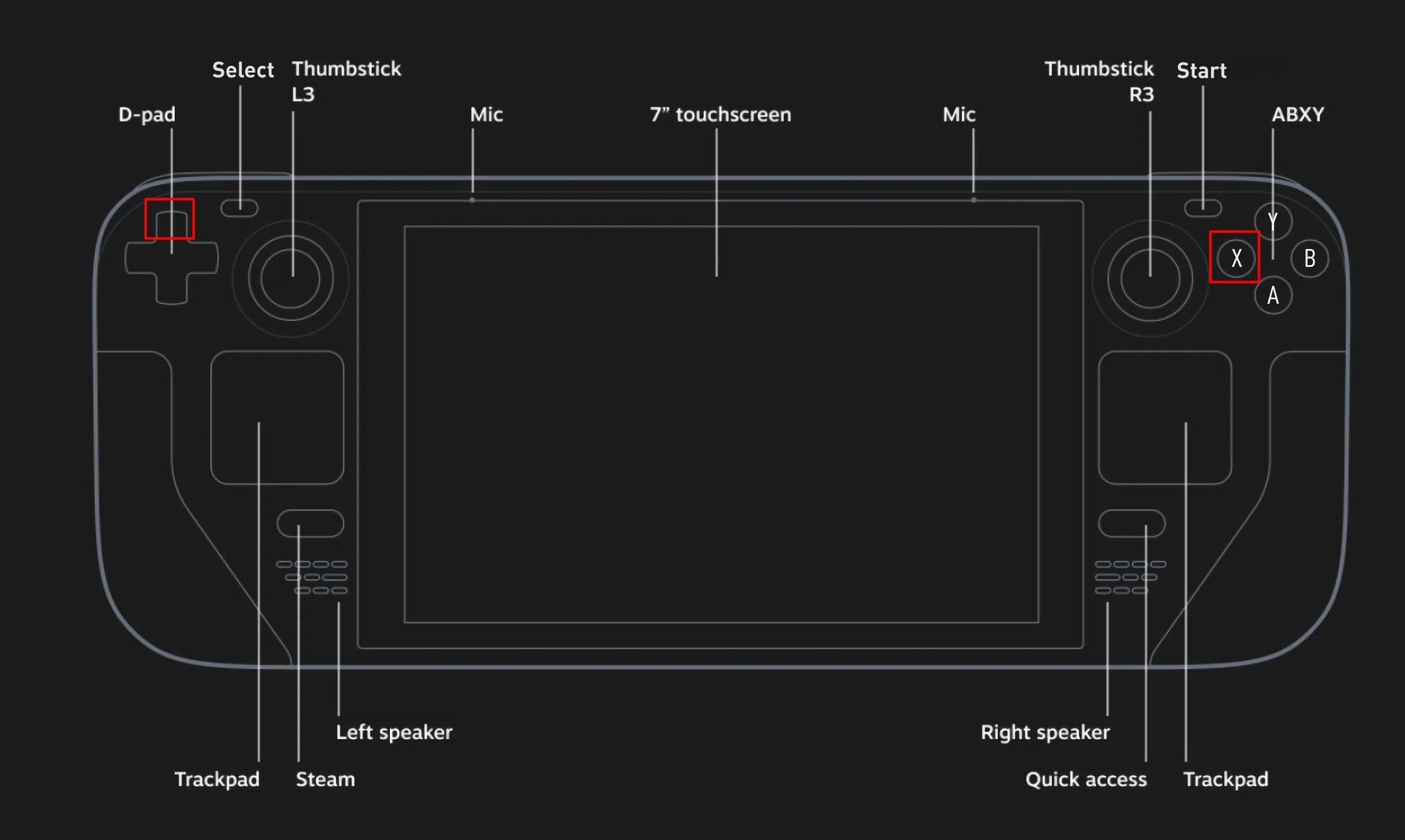
X + Down arrow to save GPS waypoints.
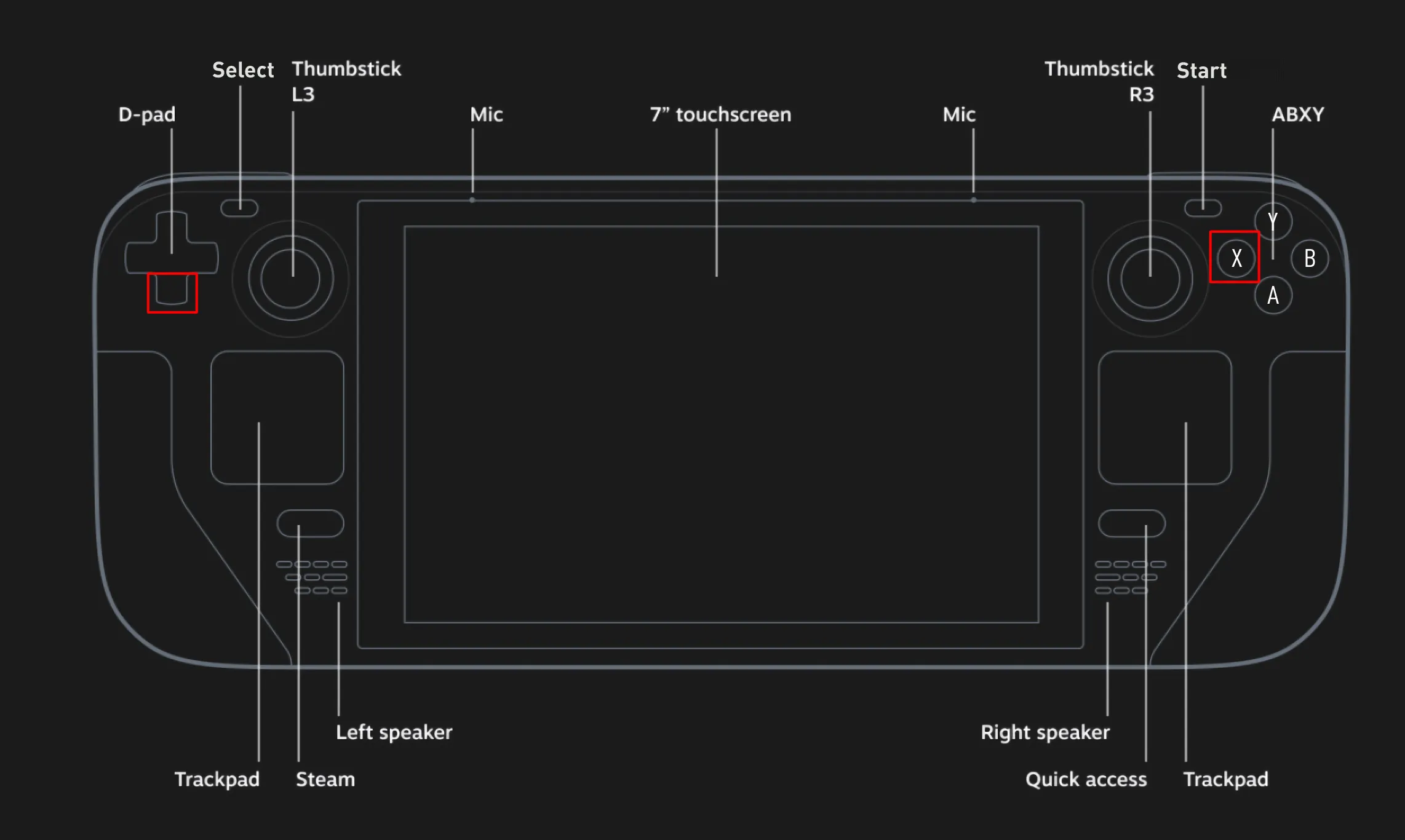
X + Right arrow to move the robot through the saved GPS waypoints.