Isaac Simulation

Figure 1: NOVA Carter Robot navigating a warehouse environment.
In our observations, we tested the Nova Carter robot, as shown in the image above, for navigation in a small warehouse environment using Isaac Sim. The robot, equipped with 2D and 3D LiDAR, fisheye, and depth cameras, was tasked to navigate static and dynamic obstacles.
Static Obstacle Navigation
The image below depicts Isaac Sim and RViz2 side-by-side, with the robot planning a path around a static object in the warehouse. While the high-definition scene enhances realism, the robot experiences noticeable lag due to the computational demand of the graphics.
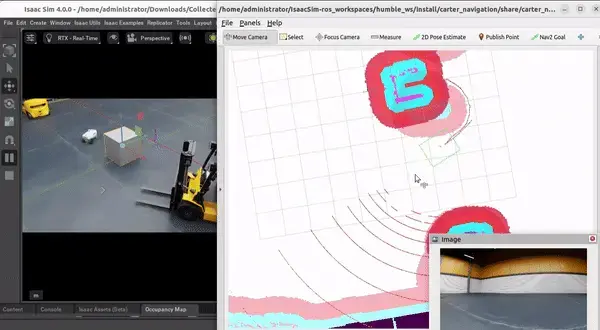
Static obstacle navigation in Isaac Sim
Dynamic Obstacle Detection
For dynamic obstacles, such as a person walking through the environment, the simulation struggled to update the map in real-time. By the time the person was detected and the map updated in RViz2, the person had already moved forward, leaving outdated occupancy marks. This delay compromises the reliability of real-time obstacle detection, an issue tied to the simulation and less likely to occur in real-world scenarios.
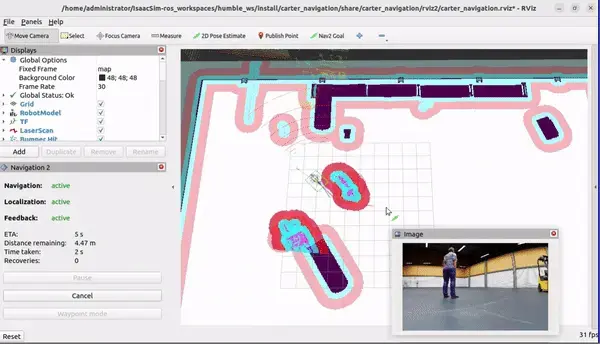
Dynamic obstacle detection in Isaac Sim
Tradeoff: Graphics vs. Speed
Isaac Sim’s high graphics quality comes at the cost of simulation speed. This tradeoff poses challenges when trying to create a digital twin of a realistic environment for algorithm testing. A digital twin must ensure safety protocols and accurate real-time processing. When the simulation platform itself becomes a bottleneck, it may be prudent to switch to alternatives like Gazebo, which can provide simpler scenes but better support for real-time algorithm testing without compromising safety.
Challenges with Isaac Sim for Custom Robots
Another critical challenge is adapting Isaac Sim nodes for custom robots and environments. For instance: Configuring TF for custom robots often leads to issues with Isaac Sim’s built-in nodes failing to recognize parent-child relationships, causing delinked transforms.
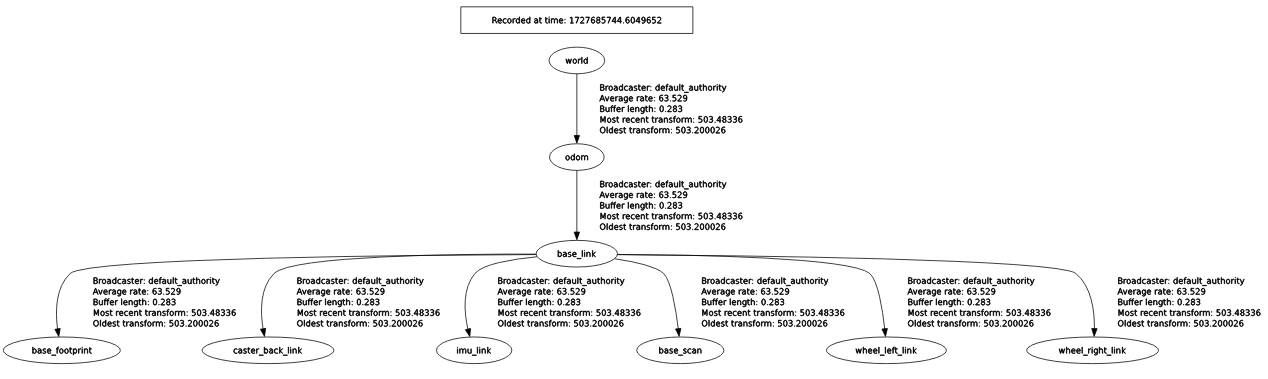
Isaac Sim provides several ROS2 nodes for handling TF transforms and odometry, such as:
TF Publisher for sensors and full articulation trees.
Raw TF Publisher for individual transforms.
Odometry Publisher for robot movement tracking.
These nodes can be visualized in the Isaac Sim viewport for better debugging. However, the overhead in adapting and troubleshooting these nodes can be time-consuming.

Recommendations
While Isaac Sim is an excellent platform for high-fidelity simulations, it is not always ideal for scenarios requiring speed and efficiency. For testing safety protocols or creating realistic digital twins, alternatives like Gazebo might offer a more balanced solution. High-definition graphics are secondary to the ability to reliably test algorithms under realistic constraints.