SMAC Planner + MPPI Controller
Testing Scenarios and Observations
Straight-Line Movement - The robot performed satisfactorily, following a smooth and direct path. - No significant deviations or delays were observed.
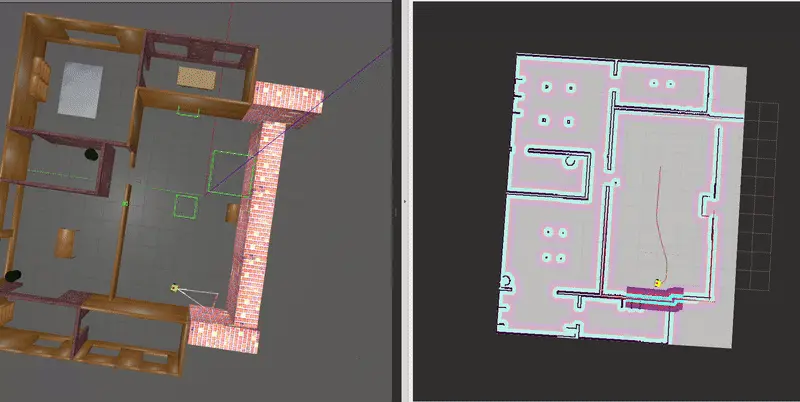
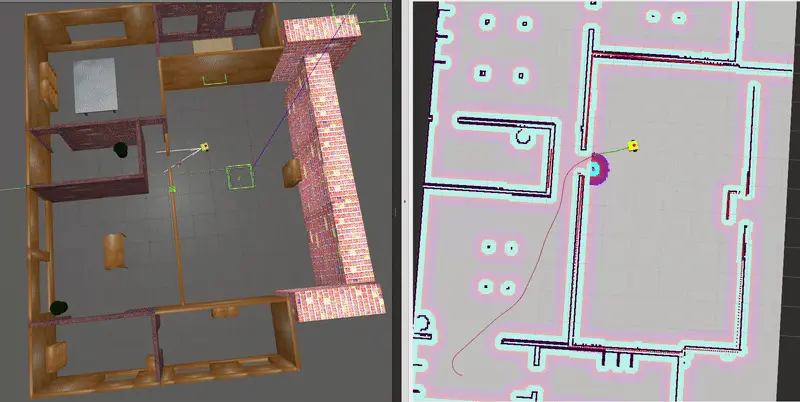
Navigating Static Obstacles - The Smac Planner generated a longer path to avoid obstacles. - As the robot approached the goal, it took additional time to stabilize. - The robot struggled slightly when passing through narrow gaps between walls, experiencing delays due to repeated replanning.
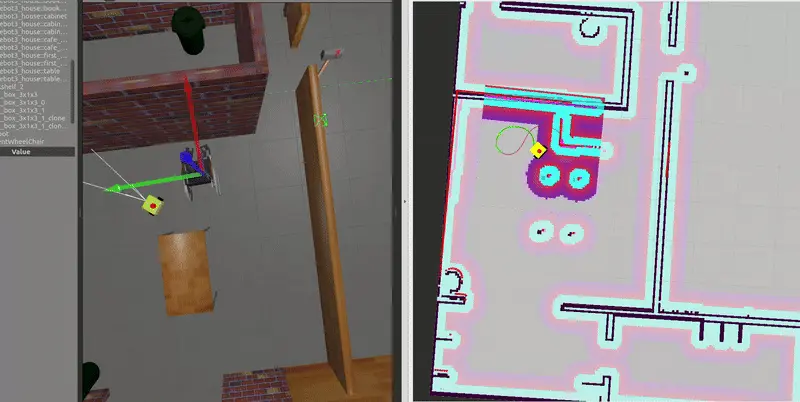
Navigating Dynamic Obstacles - The robot detected a moving wheelchair but was less robust in avoiding it compared to the NavFn + MPPI combination. - Multiple replanning attempts were necessary to successfully navigate around the obstacle. - Despite these challenges, the robot ultimately reached the goal.
Performance Summary
Scenario |
Performance |
|---|---|
Straight-Line Movement |
Smooth and efficient navigation. |
Static Obstacles |
Planned longer paths; delays in narrow gaps and stabilizing near the goal. |
Dynamic Obstacles |
Detected moving objects but struggled with robustness; required multiple replans. |
Conclusion
The combination of Smac Planner and MPPI Controller demonstrates strong potential for complex environments, particularly in scenarios requiring kinematic awareness and smooth trajectory optimization. However, challenges remain:
Static Obstacles: Path planning and stabilization need improvement for close proximities.
Dynamic Obstacles: Responsiveness to fast-moving objects requires further tuning.
Note
Future Improvements - Optimize Smac Planner parameters for shorter paths and quicker stabilization. - Fine-tune MPPI cost weights for better responsiveness to dynamic obstacles.