NavFn Planner + DWB Controller
This experiment evaluates the robot’s navigation capabilities using various combinations of global planners and local controllers from the Nav2 stack. Each combination was tested under three distinct scenarios:
Straight-Line Movement
Navigating Static Obstacles
Navigating Dynamic Obstacles
This configuration employs the NavFn Planner for global path planning and the DWB Local Planner for local trajectory adjustments.
Component |
Plugin/Server |
Type |
Description |
|---|---|---|---|
Planner Server |
nav2_navfn_planner/NavfnPlanner |
Global Planner |
Computes the shortest path from start to goal using Dijkstra’s algorithm on a costmap. |
Controller Server |
dwb_core::DWBLocalPlanner |
Local Controller |
Evaluates possible trajectories and selects the one that optimally balances progress, speed, and obstacle avoidance. |
Observations and Results
Straight-Line Movement - The robot adhered closely to the planned trajectory with minimal drift. - Smooth motion was achieved by tuning parameters such as max_velocity and yaw_goal_tolerance.
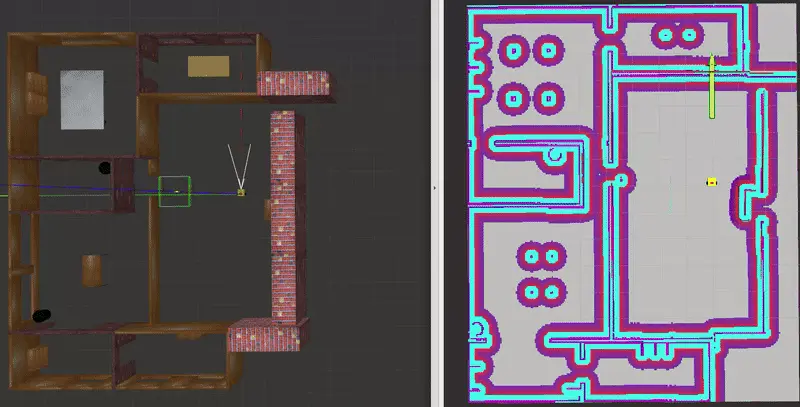
Note
The scene is speed-forwarded and does not reflect the true speed (0.26 m/s).
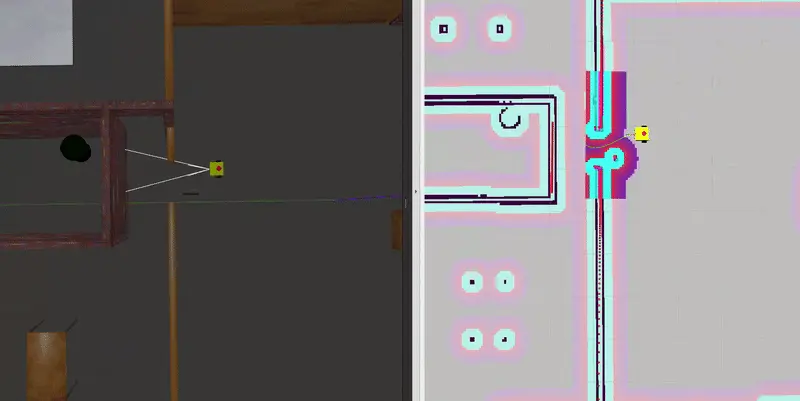
Static Obstacles - The robot slowed down at the junction and adjusted its speed. - Trajectory adjustments were made by the robot, and it remained on the global path. - Minor path deviations were corrected by the local controller.
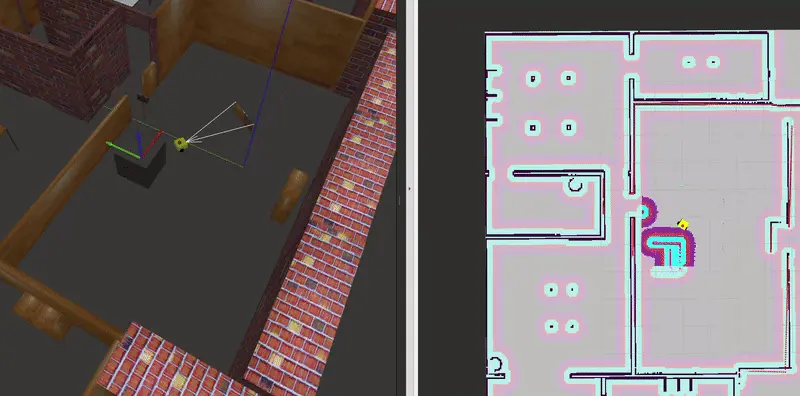
Dynamic Obstacles - The robot successfully responded to a moving cube as a placeholder for a moving person but exhibited slight delays when encountering faster objects. - The robot did not collide with the moving cube. - The robot did not maintain a safe distance, likely due to suboptimal tuning of parameters such as inflation_radius, PathDist.scale, or obstacle_max_range in the local and global costmaps.
Performance Summary
Scenario |
Performance |
|---|---|
Straight-Line Movement |
Smooth and precise navigation. |
Static Obstacles |
Reliable obstacle avoidance with minor deviations. |
Dynamic Obstacles |
Adequate responsiveness to slow-moving obstacles; improvement needed for fast-moving objects and maintaining a safe distance. |
Future Considerations
The TEB Local Planner could be explored for enhanced handling of dynamic obstacles.
The Theta* Global Planner may be utilized for more direct and efficient path generation.