Mobile Manipulation Platform Ridgeback
Note
This package supplies Sphinx-based tutorial content to assist you with setting up and using MBS mobile manipulation platform. The tutorials topics are listed in the left column, and presented in the suggested reading order.

|

|

|

|
|
Attention
These tutorials assume that you are comfortable working with ROS. We recommend starting with ROS tutorial if you are not familiar with ROS already.
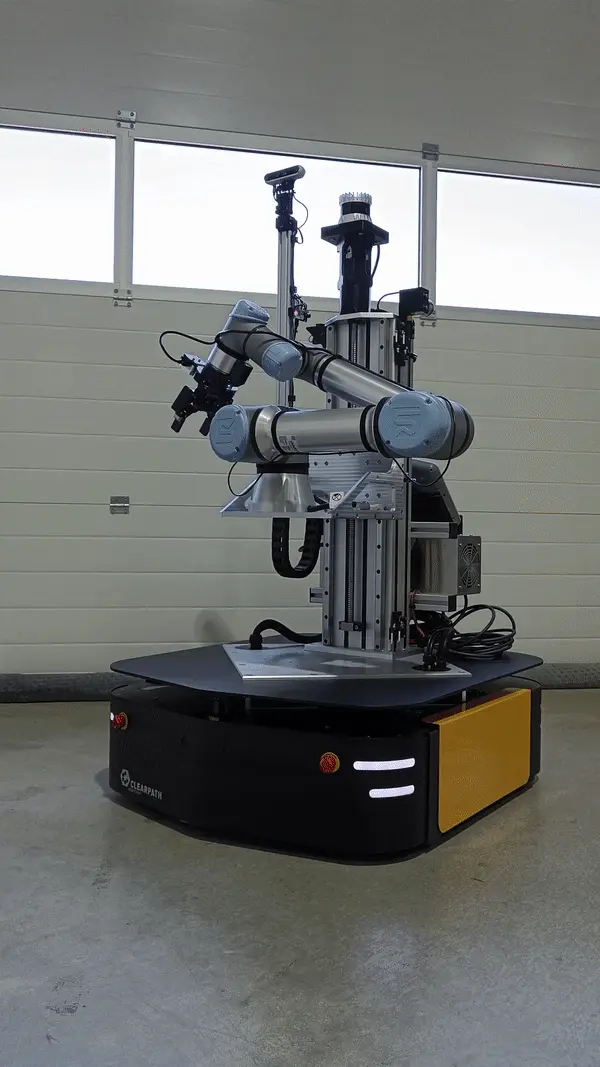
The Mobile Manipulation Platform (MMP) Ridgeback in action, demonstrating mobility and dual-arm coordination.
Clearpath Ridgeback
The Clearpath Ridgeback is a highly adaptable, mid-sized robotic platform, engineered to meet the demanding requirements of both research and development as well as industrial environments. Its low-profile design makes it ideal for navigating tight spaces, while its robust build ensures stability and durability. The Ridgeback’s versatility stems from its advanced features and extensive customization options, making it a go-to solution for a wide array of applications.
Key Features:
Omni-Directional Movement: The Ridgeback is equipped with advanced omni-directional wheels, allowing it to move seamlessly in any direction. This capability provides unparalleled maneuverability, making it perfect for dynamic and cluttered environments.
Precise Control: With its high-precision control systems, the Ridgeback can execute complex movements and tasks with exceptional accuracy. This precision is crucial for applications requiring delicate handling and exact positioning.
360-Degree Field of View: The platform features a comprehensive 360-degree field of view, ensuring that it can perceive and navigate its surroundings effectively. This all-encompassing vision is essential for obstacle avoidance and environment mapping.
Customization and Components:
The Ridgeback’s current configuration is tailored to enhance its functionality and adaptability, featuring the following components:
Movable Lift with Robotic Arm:
A customizable, movable lift system is integrated into the Ridgeback, providing variable height adjustment to the attached robotic arm. This setup allows for a wide range of manipulation tasks, from picking and placing to complex assembly operations.
Ouster 3D Scanner:
Mounted on top of the lift, the Ouster 3D scanner delivers a 360-degree, high-resolution scan of the environment. This sensor is vital for creating detailed 3D maps, detecting obstacles, and navigating complex spaces with precision.

Hokuyo Lidar Sensors:
The Ridgeback is equipped with two Hokuyo lidar sensors, one positioned at the front and the other at the back. Each sensor provides a 360-degree coverage, offering comprehensive environmental sensing. This dual lidar setup enhances the robot’s ability to detect obstacles, ensuring safe and efficient operation.

Intel RealSense D455 and D405:
The Ridgeback is outfitted with Intel RealSense D455 and D405 cameras, delivering advanced depth sensing capabilities. The D455 offers a longer range and higher accuracy for wide-area scanning, while the D405 provides precise short-range depth data. This combination enables robust 3D perception for various applications, from navigation to object recognition.


Control Joystick — Steamdeck Controller:
For intuitive manual control, the Ridgeback includes a Steamdeck controller. This versatile joystick allows operators to effortlessly maneuver the robot and manage its functions, offering a user-friendly interface for real-time adjustments and remote operation.

In summary, the Clearpath Ridgeback stands out as a versatile and powerful robotic platform, offering advanced features and extensive customization options. Its ability to move omni-directionally, coupled with precise control and comprehensive environmental sensing, makes it an invaluable asset in both research and industrial applications. Whether navigating a cluttered laboratory or streamlining a production line, the Ridgeback is designed to meet the challenges of modern robotics with reliability and precision.
Robot Upgrade
Manipulators
In terms of manipulators that can be installed and integrated with your mobile platform, several recommended arms are available. Each has its own perks and limitations. The table below illustrates some of the key features of the recommended arms that can be installed with the mobile platform.
Comparative Analysis
Company |
UFACTORY |
FRANKA EMIKA |
UNIVERSAL ROBOTS |
Operation |
Host PC |
Host PC |
Host PC |
Teach Pendant |
|||
Software Development |
Plug & play |
Config. Req. |
Config. Req. |
I/O Ports |
Multi |
None |
Multi |
Sensor Integration |
Available |
None |
Available |
ROS Control |
Immediate |
Config. Req. |
Config. Req. |
Pricing |
Low |
High |
High |
Mobile Platforms
For mobile platform, several recommended mobile platforms are available. A new and interesting mobile platform that can be combined with your robot arm is the ROVO2. The table below illustrates some of the key features of the recommended mobile platforms that can be utilized.
Comparative Analysis
Robot Weight |
290 kg |
135 kg |
50 kg |
280 kg |
Payload |
500 kg |
100 kg |
75 kg |
272 kg |
Operation time |
8 hrs |
8 hrs |
8 hrs |
2.5 hrs |
Top Speed |
20 kmhr |
3.96 kmhr |
3.6 kmhr |
18 kmhr |
Terrain Adaptability |
Extreme |
None |
Good |
Very good |
Pricing |
Medium |
Medium |
Low |
High |