Husky MI

This specifies the configuration for Husky MU. It has an ouster lidar, reach rs2 gps (rover), reach rs2 gps (base), (NRE) light systems, Lord Microstrain IMU, and long range router.
Getting Started
To setup-up the Husky, the instructional video playlist can be used which details the opening and use of the Husky.
Data Sheets
Documentations
Auxiliary Sensor Startup
On husky startup the following driver is started:
Husky base driver
The Ouster is powered on as well but the driver has to be manually started (can be automated as explained in Custom Startup Job) to ensure that the husky base driver starts up quickly. The Emlid hardware as well as the driver does not start on startup either (The hardware can be configured to start on startup via the mobile app).
Both Emlid and Ouster driver run when either of the following commands are run:
roslaunch mbs_navigation odom_navigation.launch
roslaunch mbs_gps_navigation gps_navigation.launch
Network-Setup
The Husky MU has multiple networks and vary slightly, the following table shows the networks.
Device |
Network Address |
Users/Name |
Password |
|---|---|---|---|
Husky |
192.168.131.1 |
administrator |
clearpath |
Flir |
192.168.131.2 |
admin |
XwfHpQiR |
Emlid |
192.168.2.15 |
N/A |
N/A |
Ouster |
192.168.132.1 |
N/A |
N/A |
Long Range Router |
192.168.131.101 |
Husk-A200-0856-Long-Range-5G |
clearpath |
Long Range Router |
192.168.131.101 |
Husk-A200-0856-Long-Range-2G |
clearpath |
Operation
To use the waypoint navigation and drivers, the following steps must be followed:
Connect to the Husky WiFi.
ssh into the husky via:
$ ssh -X administrator@192.168.131.1
$ clearpath
The following message will show up with quick instructions for startup.
---------------------------------------------------------------------------------------------------
__ ____ ______ ____ _______ _____ _ _ ____ _____ _____
| \/ \ \ / / _ \ / __ \__ __/ ____| | | |/ __ \| __ \ / ____|
| \ / |\ \_/ /| |_) | | | | | | | (___ | |__| | | | | |__) | _ _| | __
| |\/| | \ / | _ <| | | | | | \___ \| __ | | | | ___/ | | | | | |_ |
| | | | | | | |_) | |__| | | | ____) | | | | |__| | | | |_| | |__| |
|_| |_| |_| |____/ \____/ |_| |_____/|_| |_|\____/|_| \__,_|\_____|
Current PC: Husky
---------------------------------------------------------------------------------------------------
Husky IP: 192.168.131.1 (ssh -X administrator@192.168.131.1) (WiFi)
Pswd: clearpath
GPS Rover IP: 192.168.2.15 (USB)
Pswd: emlidreach
GPS Base IP: - (Hotspot)
Pswd: emlidreach
Flir IP: 192.168.131.2
Flir Web: admin
Flir Pswd: XwfHpQiR
Ouster IP: 192.168.132.1 (LAN)
WiFi IP: 192.168.131.101 (Long range)
Pswd: clearpath
Router Name: root
Router Pswd: clearpath
WiFi IP: 192.168.131.100 (Short range)
Pswd: clearpath
Router Name: admin
Router Pswd: Admin123
---------------------------------------------------------------------------------------------------
Husky-Drivers
---------------------------------------------------------------------------------------------------
Husky status: sudo service mbs_husky status
Husky start: sudo service mbs_husky start
Husky stop: sudo service mbs_husky stop
Husky restart: sudo service mbs_husky restart
View robot: roslaunch mbs_viz viz.launch
---------------------------------------------------------------------------------------------------
Auxiliary driver:
---------------------------------------------------------------------------------------------------
Ouster driver: roslaunch mbs_ouster ouster.launch (Doesn't launch on startup)
Emlid driver: roslaunch mbs_utilities reach_rs.launch (Doesn't launch on startup)
Flir driver: roslaunch mbs_flir flir_driver.launch (Doesn't launch on startup)
Lights Toggle: rosservice call /set_lights "front: true rear: false top: false"
(Press tab tab on the keyboard after rosservice call /set_lights to auto fill)
---------------------------------------------------------------------------------------------------
Waypoint driver
---------------------------------------------------------------------------------------------------
Odom Navigation driver: roslaunch mbs_navigation odom_navigation.launch
(Launches Ouster, Velocity Smoother, SensorFusion, Movebase, Empty Mapserver)
GPS Navigation driver: roslaunch mbs_gps_navigation gps_navigation.launch
(Launches Emlid, Ouster, Velocity Smoother, Navsat, Movebase, SensorFusion,
Empty Mapserver)
[Requires Odom Navigation Driver]
Indoor-Collect waypoints: roslaunch mbs_waypoint_follower indoor_record_waypoints.launch
Indoor-Follow waypoints: roslaunch mbs_waypoint_follower indoor_follow_waypoints.launch
[Requires GPS Navigation Driver]
Outdoor-Collect waypoints: roslaunch mbs_waypoint_follower outdoor_record_waypoints.launch
Outdoor-Follow waypoints: roslaunch mbs_waypoint_follower outdoor_follow_waypoints.launch
---------------------------------------------------------------------------------------------------
More info on: docs.mybotshop.de/
---------------------------------------------------------------------------------------------------
For in-depth instructions the 3D-SLAM information is applicable.

Important
Please note to operate the Husky with fully charged battery otherwise if the battery power is too low then the long range WiFi may be reset due to insufficient power.
Also incase of any error please run sudo service mbs_husky restart
Custom Startup Job
The launch file mbs_husky.launch in the catkin package of mbs_husky_startup includes
everything which is being launched at the startup. Startup job and its content can be verified
in the directory /etc/ros/noetic, here the original launch file will be copied.
Warning
Do not create multiple startup jobs with multiple launch files this will break the system. Only one launch file should be created and everything else should be included in this.
If the systems breaks at startup you can start debugging by:
roslaunch mbs_husky_startup mbs_husky.launch
This will show which part of the launch file is having errors or you can start running everything in the launch file one by one in separate terminals.
Adding ROS-Nodes & Launch Files to Robot Startup
Navigate and open
mbs_husky_startup/launch/mbs_husky.launch.
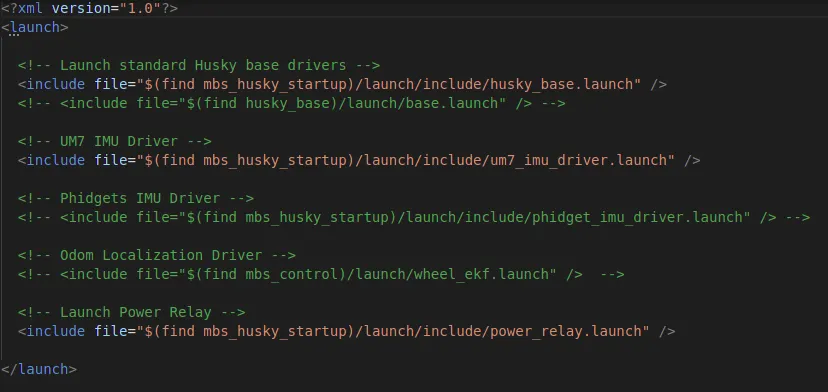
Add your custom ros node or launch file. Please note the image might differe but the procedure is the same.
Attention
An optional step is to launch the file to test if everything is working via: roslaunch mbs_husky_startup mbs_husky.launch
Run the following script:
rosrun mbs_husky_startup startup_script.sh
Verify if it is working correctly via:
sudo service mbs_husky status
Important
Once you add your custom node or launch files in the mbs_husky.launch, you will need to
run rosrun mbs_husky_startup startup_script.sh so that it updates the start-up job on the Husky’s PC otherwise it will not
be updated.
Ouster
To manually launch the ouster driver, the following command can be used:
roslaunch mbs_ouster ouster.launch
Please note that the ouster is launched with the odom_navigation and gps_navigation launch files as well.
EMLID RS2 Rover

To start the Emlid Reach RS2 driver separately, run:
roslaunch mbs_utilities reach_rs.launch
Important
The Emlid RS2 should be on for this operation to work. By default it does not startup with Husky (can be done via the browser). Press and hold the emlid and when the blue leds of link are solid, then it means it has botted up and is linked.
Lord Microstrain IMU

It starts up be default. The parameters can be modified for the sensor fusion of the IMU with the Husky in the
mbs_control/config/wheel_ekf.yaml package.
The driver for the imu is in the mbs_husky_startup/launch/include/microstrain.launch
(NRE) Light System

An arduino is activating the (6X) 45W Led Off-Road Lights on the XT60 connector.
The Arduino is connected to the /dev/ttyUSB0 port which
is detected by a UDEV rule.
When the robot starts, the arduino starts which controls the lights via the main PC in the husky. A startup script starts the communication between the Arduino and the main PC in the husky. To check the status of this module, the following steps are to be performed:
We can check the status of the power-relay node via:
sudo service mbs_husky status
If the icon is green, it means that the packages have started without any issues.

In the event of an error, you may restart this startup job via:
sudo service mbs_husky restart
(NRE) Light System ROS Control
Swtich on/off the lights, run the command:
rosservice call /set_lights "front: true
rear: false
top: false"
Flir

To launch the flir driver, the following command can be used:
roslaunch mbs_flir flir_driver.launch
The web interface can be accessed by the ip 192.168.131.2. The username and password is given in the operation section.