3D-SLAM
Launch the indoor slam package via:
roslaunch mbs_slam indoor_slam.launch
Launch the outdoor slam package via:
roslaunch mbs_slam outdoor_slam.launch
Launch the localization slam package via:
roslaunch mbs_slam localization.launch
Saving the Point Clouds
rosservice call /hdl_graph_slam/dump
Save all the internal data (point clouds, floor coeffs, odoms, and pose graph) to a directory.
rosservice call /hdl_graph_slam/save_map "resolution: 0.05 destination: '/full_path_directory/map.pcd'"
Save the generated map as a PCD file.
3D-Mapping
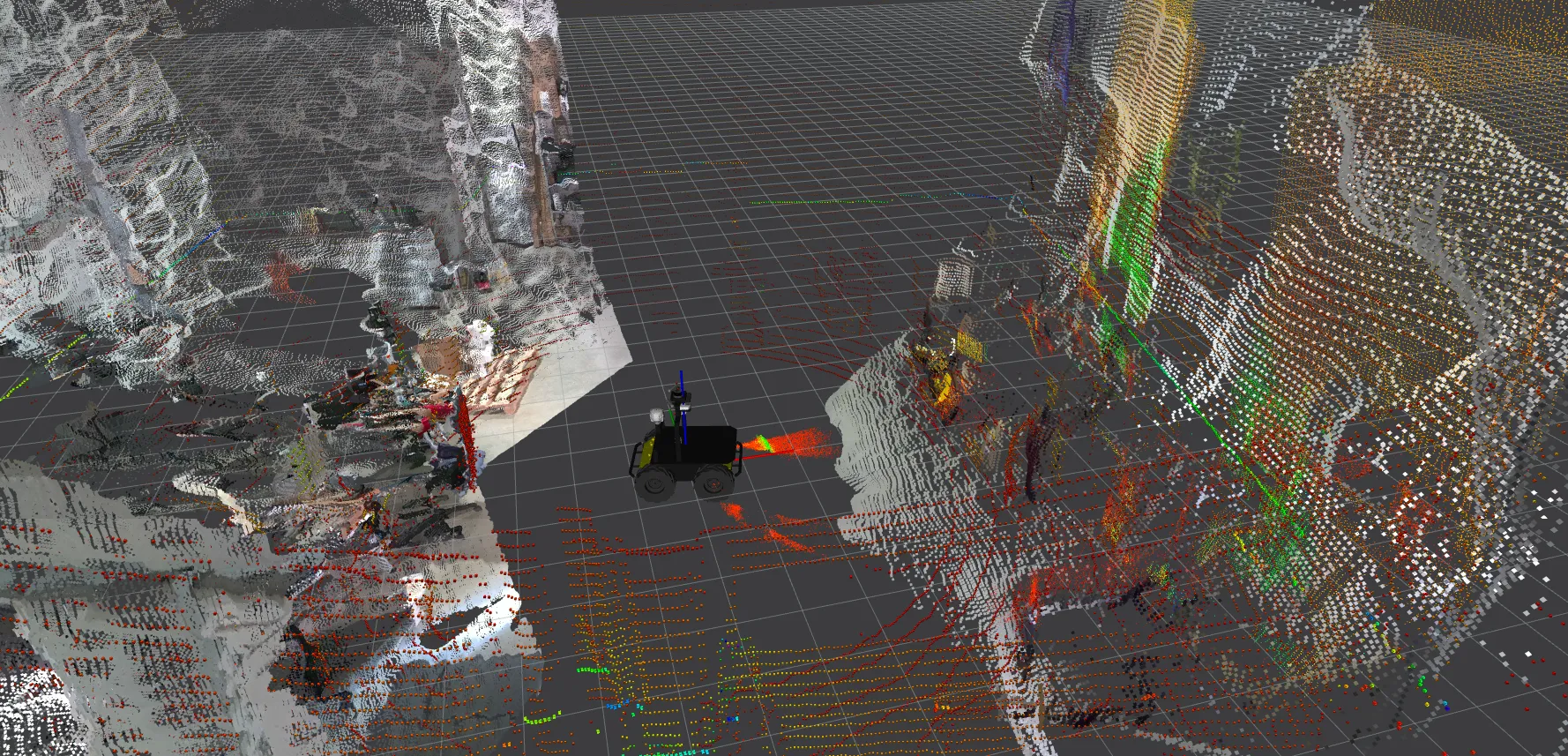
3D-SLAM Configurations
By default mbs_slam nodes requires /mbs/points(sensor_msgs/PointCloud2) to be published. All other sensor informations are optional. Indepth information on the configuration parameters can be found in koide3
GPS
enable_gps: True in case gps readings are provided. The mbs_slam
node needs typically supports 3 types of GPS messages:
/mbs/geopoint (geographic_msgs/GeoPointStamped)
/mbs/navsat (sensor_msgs/NavSatFix)
/mbs/nmea_sentence (nmea_msgs/Sentence)
From all of the above mentioned topics only longitude, latitude, and altitude are used and rest of the fields in the messages are ignored.
IMU Acceleration
enable_imu_acc: By default acceleration resulting from sensor motion
is ignored therefore it is useful to provide this paramter (Do not set
bigger values for this constraint.)
IMU Orientation
enable_imu_ori: In case the provided IMU has a reliable magentic
sensor, orientation can be added as a 3d orientation constraint. In case
of external magentic disturbances this paramter should be set to false.
Floor detection
For largescale flat indoor environments, this constraints can be specified. It will reduce the effect of accumulated rotation error.
3D-Localization
The node first does sensor localization using the onboard imu on the lidar. Odomerty prediction based on external imu is optional, if not set constant velocity model is used internally.
mbs_localization provides 3d, real-time localization.
ROS Topics
/odom(nav_msgs/Odometry)Estimated sensor pose in the map frame
/aligned\_pointsInput point cloud aligned with the map
/status(hdl_localization/ScanMatchingStatus)Scan matching result information (e.g., convergence, matching error, and inlier fraction)
Navi-Configuration

Hardware Requirements
- Autonomous ground vehicle (AGV)
- Global positiong system (GPS) device
- Inertial measurement unit (IMU)
- Logitech controller
Optional Hardware Requirements
- LiDAR
- Camera
Important
Without an auxiliary sensor such as a LiDAR, obstacle avoidance in navigation cannot be performed nor localization.
Software Requirements
Ubuntu 18.04/Ubuntu 20.04
ROS-melodic/ROS-noetic
MYBOTSHOP GPS package
GPS package dependencies
Warning
The provided MYBOTSHOP GPS package allows for point to point navigation
utilizing GPS coordinates. It integrates the MoveBase package which in
turn allows for collision avoidance. This GPS package is currently designed
for 2D planes with a planned expansion for 3D planes. Caution must be
exercised when using the package around people and or in an
un-constrained environment as any fault in sensors or misconfiguration
may lead to an accident.
Configuration
In the provided package, several configuration have to be adjusted which are:
Localization
GPS localization config file
Odom localization config file
MoveBase
Base local planner params
Costmap common params
Global costmap params
Local costmap params
Movebase params
In-depth information is documented by the authors of the robot localization package.
Quick Tuning
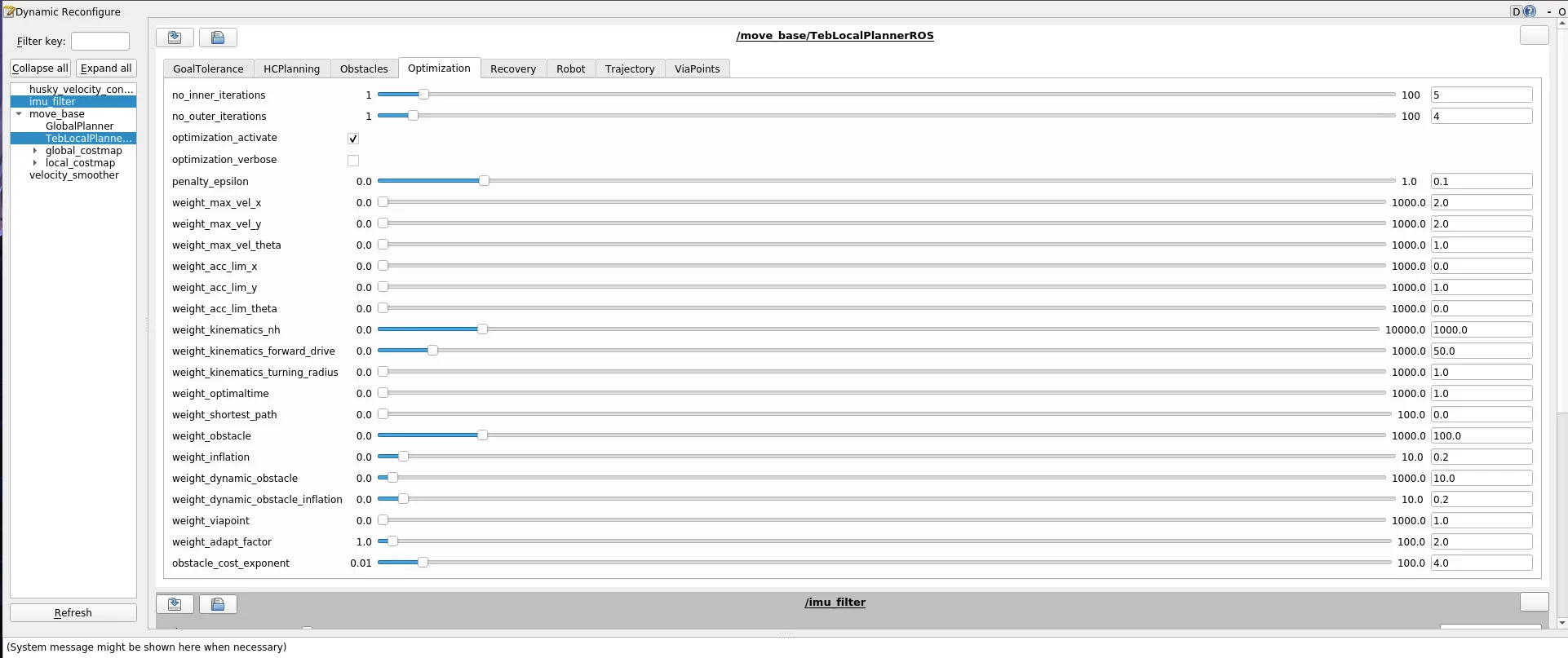
Quick tuning and configuration can be performed via rqt_reconfigure
rosrun rqt_reconfigure rqt_reconfigure
GPS Localization Config
In this configuration file, we combine three sensor readings, which are the robots odom, imu, and the gps.
frequency: 20The frequency depicts the rate at which the node publishes information.
two_d_mode: trueIt tells to ignore the height readings from the incoming sensors as we are navigating in 2D.
publish_tf: truePublishes a transform from the map frame to the odom frame
transform_time_offset: 2Offsets the transform as some packages require transforms to be future off-set by a few seconds.
Setting the sequence of transforms for this localization node.
odom_frame: odombase_link_frame: base_linkworld_frame: mapmap_frame: map
It is important to change the odom to the odom published by your robot.
odom0: /your_robot/odomThis is typically published by the robots controller
odom0_config: [false, false, false, false, false, false, true, false, false, false, false, false,false, false, false]The boolean values are (X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za).
v is velocity and a is acceleration
odom0_differential: trueThis indicates whether the odom velocity should be computed from the given x and y positions.
imu0: /imu/dataimu0_config: [false, false, false, false, false, true, false, false, false, false, false, true, true, false, false]The boolean values are (X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za).
v is velocity and a is acceleration
imu0_differential: falseodom1: /odometry/gpsThis is typically published by the navsat node. Ensure that the correct topic is used according to what you have assigned.
odom1_config: [true, true, false, false, false, false, false, false, false, false, false, false, false, false, false]The boolean values are (X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za).
v is velocity and a is acceleration
odom1_differential: false
It is highly important to tune the process noises.
process_noise_covariance:This determines on how much to trust the incoming data. Each line represents X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za. Values for these are assigned along the diagonals.
initial_estimate_covariance:This determines on how much to trust the initial data. Each line represents X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za. Values for these are assigned along the diagonals.
For more information, the following repository by MethylDragon has a great explanatory guide.
Odom Localization Config
In this configuration file, we combine two sensor readings, which are the robots odom, and imu.
frequency: 20The frequency depicts the rate at which the node publishes information.
two_d_mode: trueIt tells to ignore the height readings from the incoming sensors as we are navigating in 2D.
publish_tf: truePublishes a transform from the odom frame to the map frame
transform_time_offset: 1Offsets the transform as some packages require transforms to be future off-set by a few seconds.
Setting the sequence of transforms for this localization node.
odom_frame: odombase_link_frame: base_linkworld_frame: odom
It is important to change the odom to the odom published by your robot.
odom0: /your_robot/odomThis is typically published by the robots controller
odom0_config: [false, false, false, false, false, false, true, false, false, false, false, false,false, false, false]The boolean values are (X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za).
v is velocity and a is acceleration
odom0_differential: falseThis indicates whether the odom velocity should be computed from the given x and y positions.
imu0: /imu/dataimu0_config: [false, false, false, false, false, true, false, false, false, false, false, true, true, false, false]The boolean values are (X, Y, Z, roll, pitch, yaw, Xv, Yv, Zv, rollv, pitchv, yawv, Xa, Ya, Za).
v is velocity and a is acceleration
imu0_differential: false
MoveBase Local Planner
TEB planner TEB planner tuning
Important
It is important to note that the DWA planner is no longer used and we use the TEB planner. Configuration for the teb planner can be found in the TEB planner wiki. An excellent resource for tuning your TEB planner is vailable in TEB planner tuning.
It is recommended to configure the move base planner to ensure correct movement. Several important ones are:
meter_scoring: trueWhen true distance is measured in meters.
yaw_goal_tolerance: 0.157
Tolerance in radians for movebase.
xy_goal_tolerance: 0.25
Tolerance in xy coordinates for movebase.
path_distance_bias: 0.35
Weighting factor of how close the robot should stay to the path.
goal_distance_bias: 1.0
Weighting factor of how close the robot should attempt to reach the goal.
heading_lookahead: 0.325
Tolerance of looking ahead for available space for turning.
For more information, the following MoveBase Wiki has a brief explanation.
Costmap Common Params
The costmap will be used to integrate and utilize your existing sensor for collision avoidance.Important parameters for this are:
footprint: [[-0.21, -0.165], [-0.21, 0.165], [0.21, 0.165], [0.21, -0.165]]
The footprint defines a square size for the robot. The robots mid point is taken as 0,0 and the the corner points are the distance from the mid point.
footprint_padding: 0.1
Safety-gap that inflates the original footprint.
obstacle_layer:
Sensors that are utilized for sensing. Typically, scan is used for LiDARs and the sort. Important is to change the sensor_frame to match the URDF and the topic to match the input message of the LiDAR.
For more information, the following Costmap Wiki has a brief explanation.
Global Costmap Params
The global costmap of movebase node, as the name states publishes the global costmap. It takes the map, provided by the map server as a static layer. An important point to note is that some warning messages may occur if the on board computer system do not compute the transforms fast enough. These warnings can be ignored.
Local Costmap Params
The local costmap of movebase node publishes the local costmap. It ypically requires the odom frame to operate. However, as we want to depend solely on our GPS, we utilize the map frame for the local costmap as well.
MoveBase Params
The movebase params are important for changing the planner frequency and controller frequency. Usually the default settings are sufficient.
recovery_behavior_enabled: true
It rotates the robot to recover from faulty planning failures or positioning, at times this is not desirable and may need to be turned off.