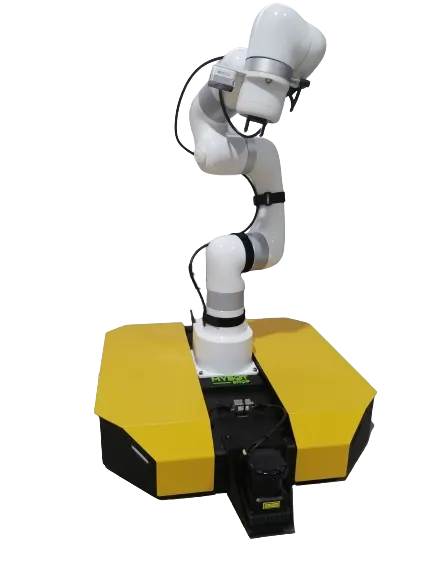
Dingo-D
To operate the robot remotely via PC, you need to setup your network as described in the Dingo-D Network section.
Important
Please note that the command mentioned above is for explanatory purposes only. You need not manually execute this command, as the dingo hardware drivers are automatically launched during the robot’s startup process.

To start the hardware-dingo drivers, please launch:
roslaunch dingo_base base.launch
Ufactory Lite6
To start the hardware-lite6 drivers, please launch:
roslaunch mmp_bringup lite6_driver.launch
This driver does not launch on startup. It is required for controlling the Lite6 arm.
Warning
Non-technical persons are not permitted to use the device as the damage it can cause is severe.
Realsense D405

To initiate the hardware driver for the Realsense camera mounted on the wrist of the Xarm6 Lite, execute the following command.
roslaunch mmp_realsense wrist_camera.launch
If the camera drivers operate correctly, you should be able to view the camera stream on RViz by following the instructions outlined in the “Visualize” section below.
Hokuyo Lidar
You can start up the Hokuyo driver located at the robot’s front by employing the command specified below.
roslaunch mmp_lidars lidars.launch
Once running, you should be able to view the laser scan data created by Hokuyo on RViz by following the instructions outlined in the Visualize section below.
Visualization
To view dingo current state, please launch:
roslaunch mmp_viz view_robot.launch
This package is useful when checking and integrating depth camera or other auxiliary sensors such as Lidar sensors.
Teleoperation
To operate the Dingo-D either in simulation or the real robot, the following command may be used:
rosrun key_teleop key_teleop.py
Important
Examples of programming the Lite6 and Dingo-D is provided in the mmp_bringup/scripts/mmp_example.py.