Rovo Simulation Gazebo
Once the ROS packages are set up for use, you can verify whether they are working correctly or not by running the following command; be sure to change the
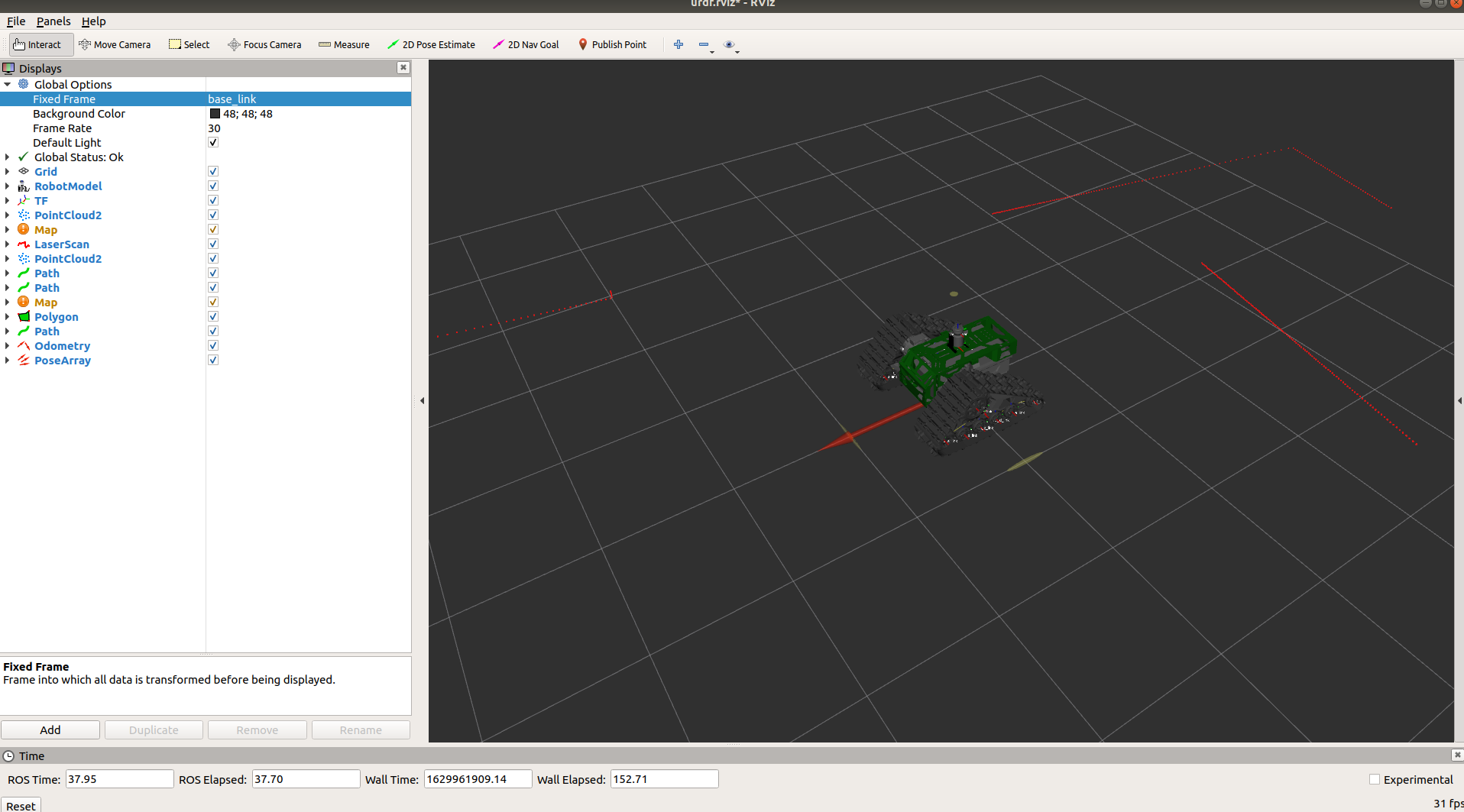
Fixed Framein the global options tobase_link:roslaunch rovo_simulator gazebo_world.launchThis should start two applications, the first is Rviz, and the second is Gazebo with pre-loaded gazebo drivers.
The Rovo should be visible, also double-check the frame is correctly selected to be the
base_link.
To add a world, go to
.gazebo/modelsand add the custom model file provided here in that folder.Once the Rovo setup is completed properly then the Rovo can be started in simulation via:
roslaunch rovo_simulator gazebo_world.launchThis will launch the robot with custom gazebo drivers which have been tuned to be identical to the real robot.
Important
Due to simulation limitation the tracks of the Rovo do not make contact with the ground, instead the treads are directly into contact with the ground. Also, simulation with the Rovo is computationally heavy, so a powerful computer is required to run the simulations. One can simply skip Gazebo and use rviz to tune and monitor the Rovo as will be described below.