Start-up¶

When the Husky is powered-on, the mbs_husky robot upstart job starts the ros hardware drivers for the Husky.
Startup Example¶
A 40 second video illustrating the activation of the visualization module, xARM6 hardware driver, and the Robotiq gripper driver.¶
Powering xARM6¶
ssh into the husky.
ssh -X administrator@192.168.131.1
clearpath
To power-on the
xARM6
rostopic pub /pwr_relay std_msgs/Bool "data: true" --once
To power-off the
xARM6
rostopic pub /pwr_relay std_msgs/Bool "data: false" --once
Important
It takes approximately 60 seconds for the arm to power up. On start-up a beep sound can be heard. After 60 seconds two consecutive beep sounds can be heard indicating that the xARM6 has successfully started and can be accessed.
Hardware drivers xARM6¶
To launch the xARM6 hardware driver, run the command:
roslaunch mbs_xarm_robotiq xarm_hardware_driver.launch
Hardware drivers Robotiq Gripper 2f-140¶
To launch the Robotiq 2f-140 hardware driver, run the command:
roslaunch mbs_xarm_robotiq robotiq_hardware_driver.launch
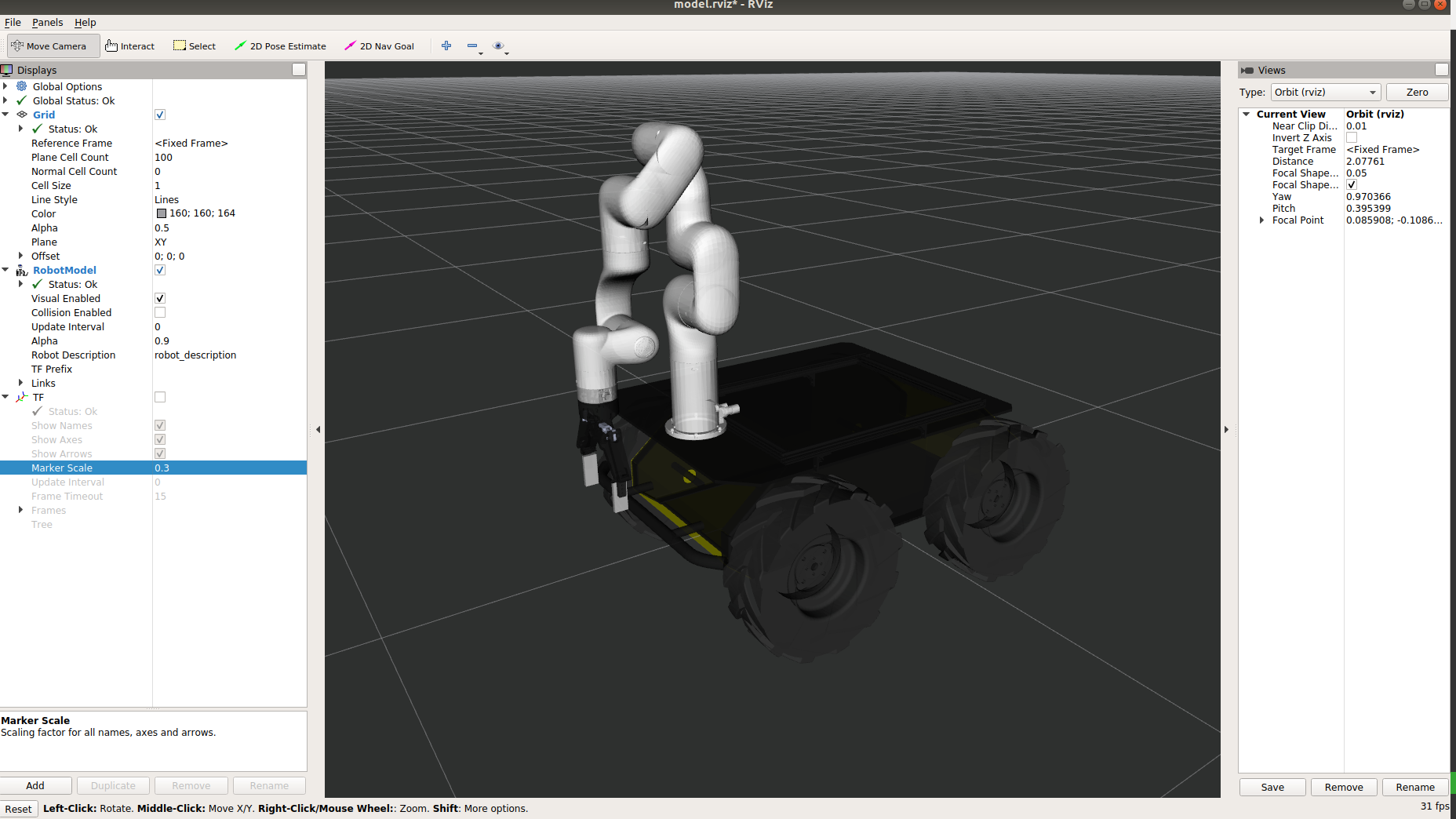
Visualization¶
The visualize the robot model.
roslaunch mbs_viz viz.launch
Husky xARM6 URDF¶